Modeling, Planning, and Control for Reconfigurable Robots
Self-reconfiguring robots and programmable matter smart materials, which can morph themselves to achieve a wide variety of different shapes and stiffnesses as tasks demand, are ideal for flexible and adaptable functionality. Compliant mechanics offer unique opportunities to enable high degree of freedom reconfigurability with reduced actuation and control.
We are interested in the fundamental theoretical and computational questions underlying robotic reconfiguration, in particular, questions such as what configurations are possible to achieve and how to plan for reconfiguration in a scalable manner. We leverage techniques from computational geometry and distributed algorithms to answer these questions, generating planning and controls methods for compliant reconfigurable robots that scale with the robot’s degrees of freedom.
Our current active projects include:
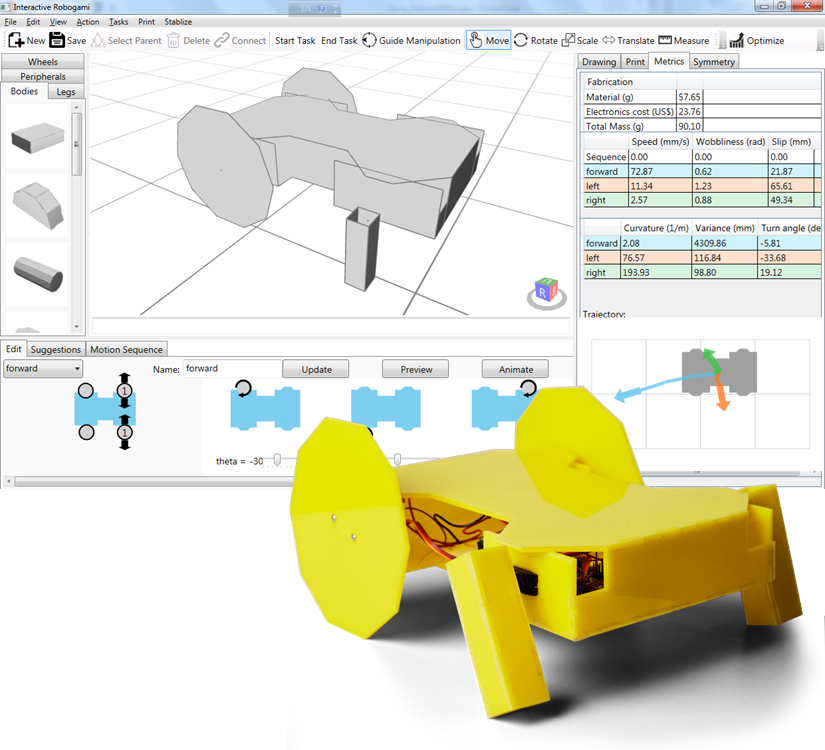
- Distributed control for adaptive stiffness in parameterized origami structures in applications such as manipulation and legged locomotion
- Geometric characterization of surfaces achievable using origami tessellations with straight and curved creases
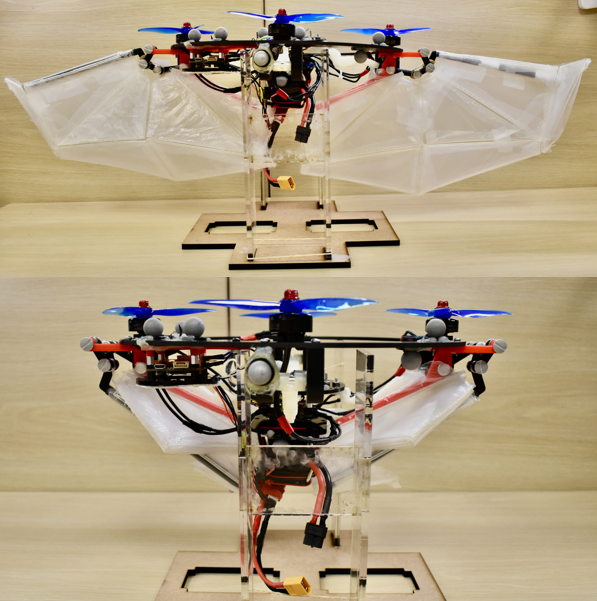
- Simulation and planning for modular trusses and lattices with tendon-driven control