By: Tanvir Aslam | Posted 5 October 2012
Image Credit: Andrew Dierkes
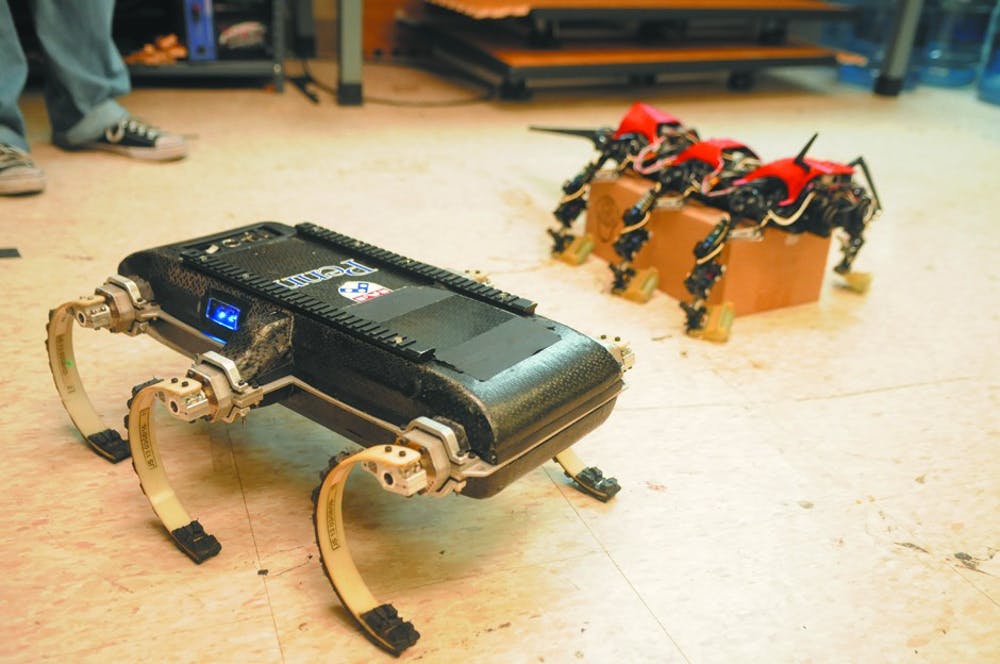
Robots created in Penn’s Kod*lab often have multiple “legs” and are able to climb and walk on uneven, jagged surfaces. Researchers in the lab believe the robots can serve practical functions, such as being able to help in search-and-rescue missions.
While many Penn students have experience warding off cockroaches in their college house rooms, a lab in the School of Engineering and Applied Science is manufacturing cutting-edge robots that mimic these insects.
At the Kod*lab — a subsidiary of the General Robotics, Automation, Sensing and Perception Laboratory — students and researchers are applying their skills to create this new generation of dynamic and dexterous robots.
SEAS professor and Electrical and Systems Engineering Department Chair Daniel Koditschek leads this initiative with a group of doctoral and masters students.
According to Koditschek, the focus of their work has been to create robots that are faster and more agile and will hopefully one day emulate living organisms.
“These days we are interested in machines that can hop, machines that can jump up on ledges,” he said.
In the middle of the lab site is a giant tree trunk, which is used to test the vertical climbing robots, according to SEAS doctoral student Aaron Johnson.
One of their earliest works in the lab was the RiSE — a six-legged robot that uses fish hook-like constructs to climb uneven surfaces. Improving upon that innovation, the Kod*lab later moved on to create the DynoClimber — a robot that can replicate the forces exhibited by climbing animals, such as geckos and cockroaches, to achieve rapid and stable vertical motion.
Today, the main project led by the group is the RHex family of robots — the latest version of which was developed at Penn. These are six-legged machines that can travel on many uneven and jagged surfaces.
Johnson, who is trying to teach these robots to “jump,” explained that “we want a machine that can go anywhere. We have taken it out to the Mojave Desert, taken it out on hills and also around the Penn campus.”
The unique half-circle shape of the robots’ legs allows them to overcome obstacles bigger than themselves.
“There are very few bots out there that can run on uneven terrain like the RHex,” Koditschek said.
Other robotics labs in the country have used the RHex as a building block to create their own unique machines like the SandBot — a sand “walker” that was developed by researchers at the Georgia Institute of Technology.
The Kod*lab family of robots makes up one of the options available to Penn students who compete in the ongoing Y-Prize competition, where teams must come up with a commercial application for these robots.
“I am planning on developing an earthquake-survivor-rescue product using these bots,” said Nikhit Balasubramanian, a competition participant and Systems Engineering graduate student.
The lab’s projects are funded by numerous organizations, including the National Science Foundation, U.S. Army research labs and the Airforce Office of Scientific Research.
The Kod*lab’s robots have numerous scientific and military applications, Koditschek said. For example, it is now working on the Canid project, which is a four-legged machine meant to emulate the bounding and galloping motion of animals like dogs.
Koditschek explained that some of these applications could include “search and rescue teams based on these devices, good reconnaissance platforms for military applications, good resources for fire and police departments, first responders to an earthquake or chemical spill or a nuclear disaster when the floors are broken up and terrain is no longer even.”
He added, “We are still in the early stages and its capabilities are not as good as a dog — but you wouldn’t want to send a dog to these places.”