VerroTouch
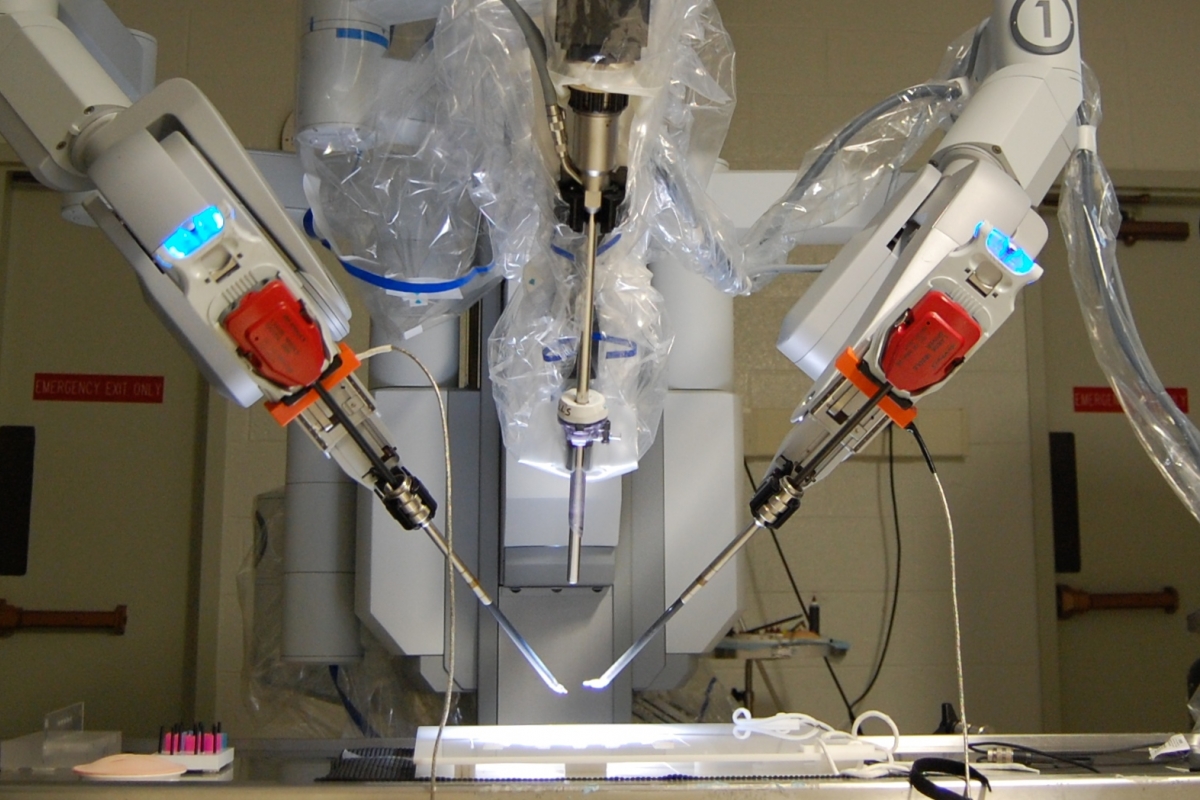
Robotic minimally invasive surgery (RMIS) enables surgeons to manipulate structures deep within the body via tiny incisions. Though the robotic tools mimic human hand motions, surgeons operate without the haptic (kinesthetic and tactile) cues they are accustomed to receiving in open and laparoscopic surgery. The Penn Haptics Group has recently introduced a method for adding tactile and audio feedback of tool vibrations to RMIS systems, creating sensations similar to what one feels and hears when using a laparoscopic tool. This method aims to make RMIS more immersive and natural. Our system, which we have named VerroTouch, measures the vibrations caused by tool contacts and immediately recreates them at the master console for the surgeon to hear and feel. This augmentation enables the surgeon to feel the texture of rough surfaces, the start and end of contact with manipulated objects, and other important tactile events. While it does not provide low frequency forces, we believe vibrotactile feedback will be useful for surgical task training and evaluation, and our studies have thus far supported this hypothesis.