University of Pennsylvania Unleashes Robot Jerboa Upon the World
By Evan Ackerman | Posted 16 Apr 2015, 5:25 PM
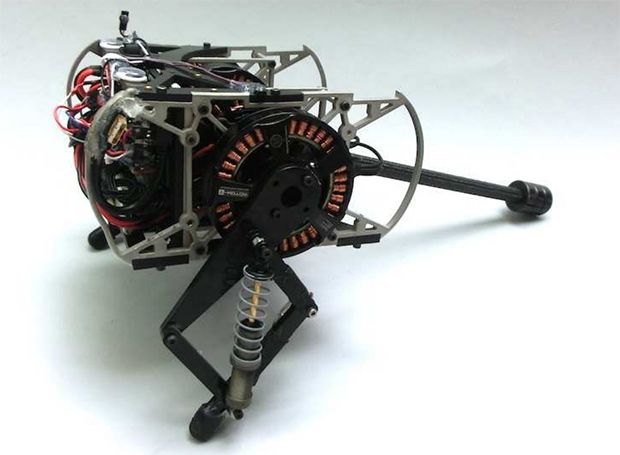
Photo: UPenn Kod*lab. Thanks to an actuated tail, this robot has hops.
I don’t think any of us ever knew just how badly we wanted a robotic jerboa until suddenly, someone built a robotic jerboa. A jerboa is sort of like a gerbil, except crossed with a kangaroo, at least as far as mobility is concerned. Jerboas bounce around on two absurdly long legs in what seems like a very dynamic and efficient type of motion, especially if you take the tail into account.

Photo: Cliff via Flickr Aww, isn’t it cute?
Avik De, a graduate student at the University of Pennsylvania, decided to try and build one based on the venerable RHex hexapod platform:
“My first thought was to build a robot that runs like RHex on two legs. So, full of visions of the running velociraptors in Jurassic Park, I set out to create a robot with a powerful tail, and two RHex-like legs.”
This is not that robot.