Canid
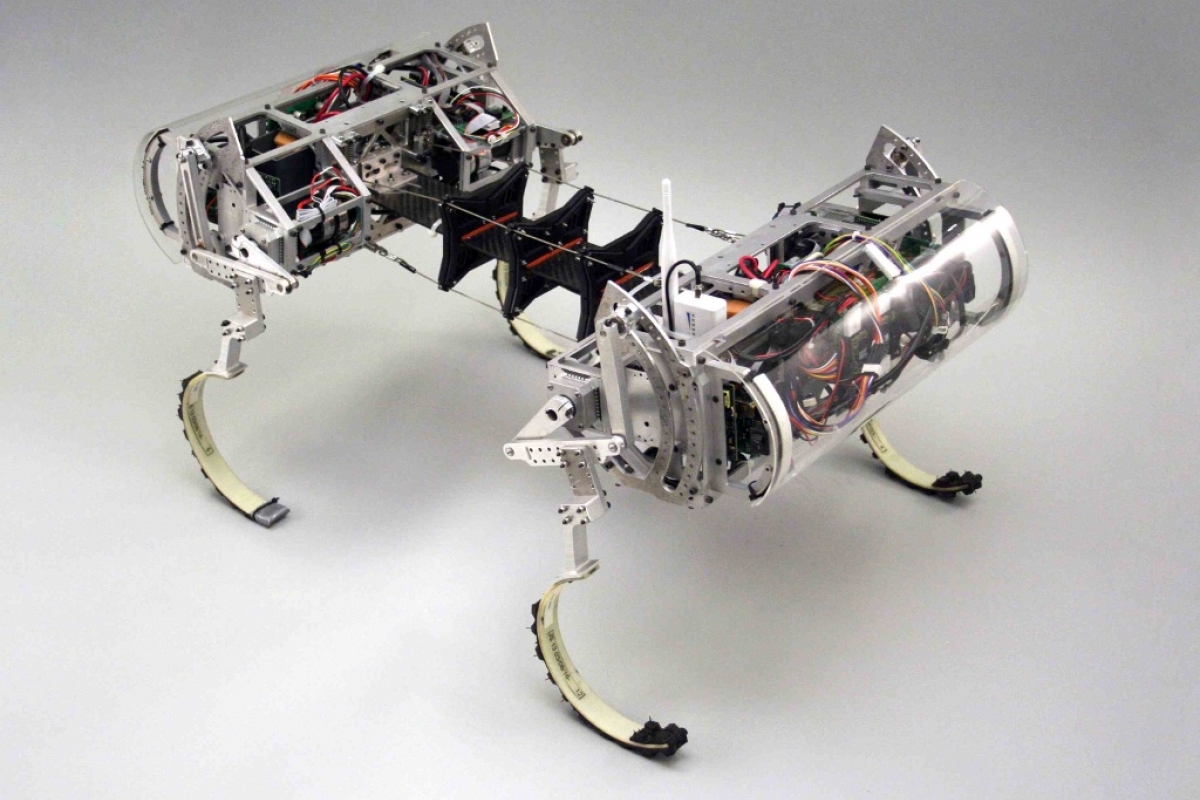
Canid is a quadruped designed to test hypotheses regarding dynamic bounding using an actuated compliant spine mechanism.
Bounding and galloping quadrupeds are the fastest mammalian runners and a growing volume of robotics research has focused on this style of locomotion. In the Canid design, we explore the value of re-directing the power output of the motors driving the spine mechanism into actuated body compliances that amplify the force at the desired speed of locomotion according to overarching “spring assisted actuation”. We hypothesize that locomotion with a high-power actuated compliance located at the body core can offer significant speed and endurance benefits over quadrupeds without such actuated compliance.
