Cooperative Manipulation and Transport
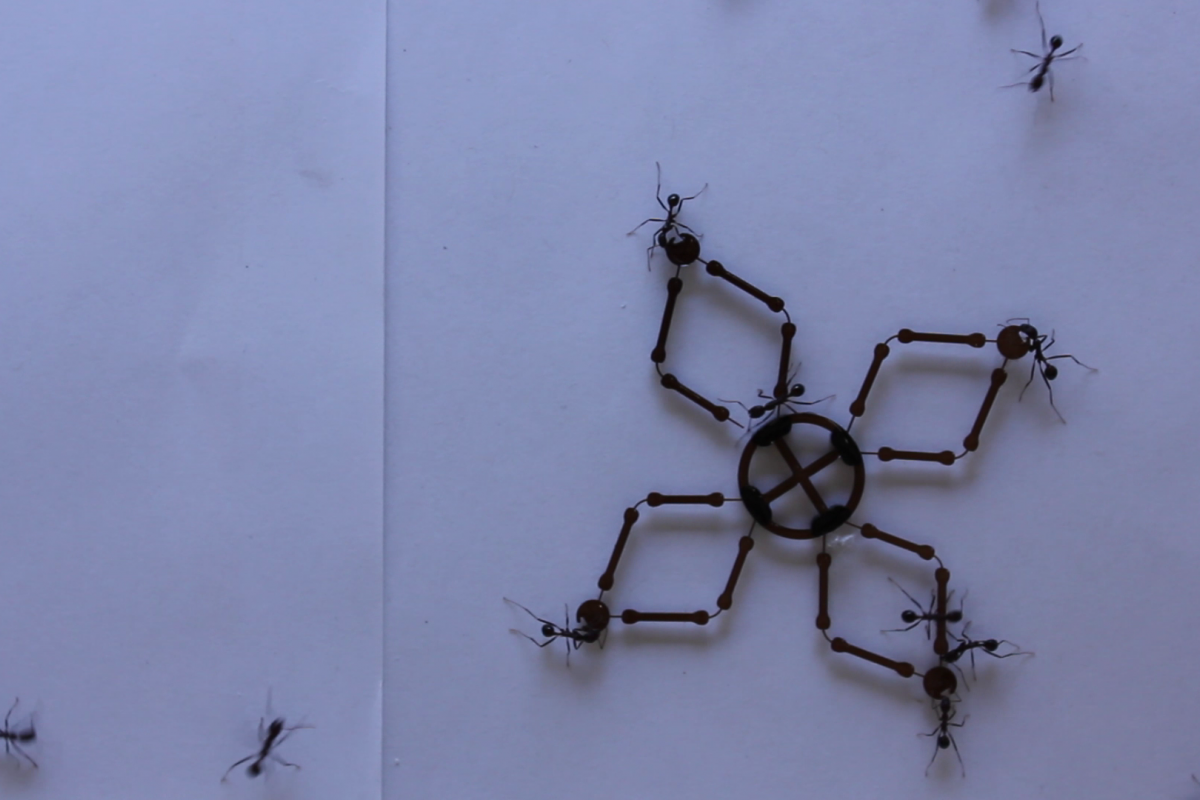
How can independent, autonomous robots collaborate to perform such manipulation tasks as lifting and transporting large or heavy payloads? There are several examples in nature where individuals cooperate to perform tasks they individually cannot perform. In collaboration with biologists, Kumar Lab studies how ants engage in cooperative prey retrieval carrying large, awkwardly shaped morsels of food back to their nest. They also study bacteria lifting and swimming with large payloads. Using biological inspiration, in collaboration with Pratt Lab at ASU, Kumar Lab develops models, designs algorithms and creates robotic systems that are able to cooperate both on the ground and in the air.
