Cross – modal Map Learning for Vision and Language Navigation
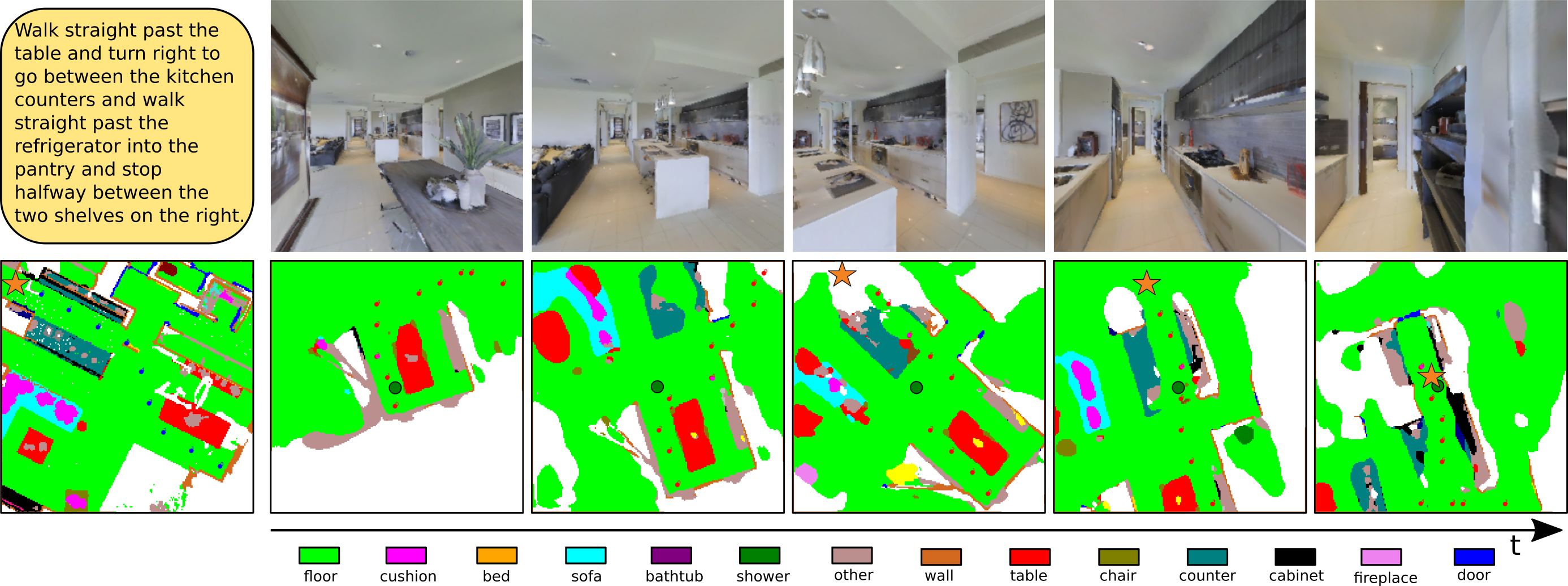
We consider the problem of Vision-and-Language Navigation (VLN). The majority of current methods for VLN are trained end-to-end using either unstructured memory such as LSTM, or using cross-modal attention over the egocentric observations of the agent. In contrast to other works, our key insight is that the association between language and vision is stronger when it occurs in explicit spatial representations. In this work, we propose a cross-modal map learning model for vision-and-language navigation that first learns to predict the top-down semantics on an egocentric map for both observed and unobserved regions, and then predicts a path towards the goal as a set of waypoints. In both cases, the prediction is informed by the language through cross-modal attention mechanisms.