Piccolissimo
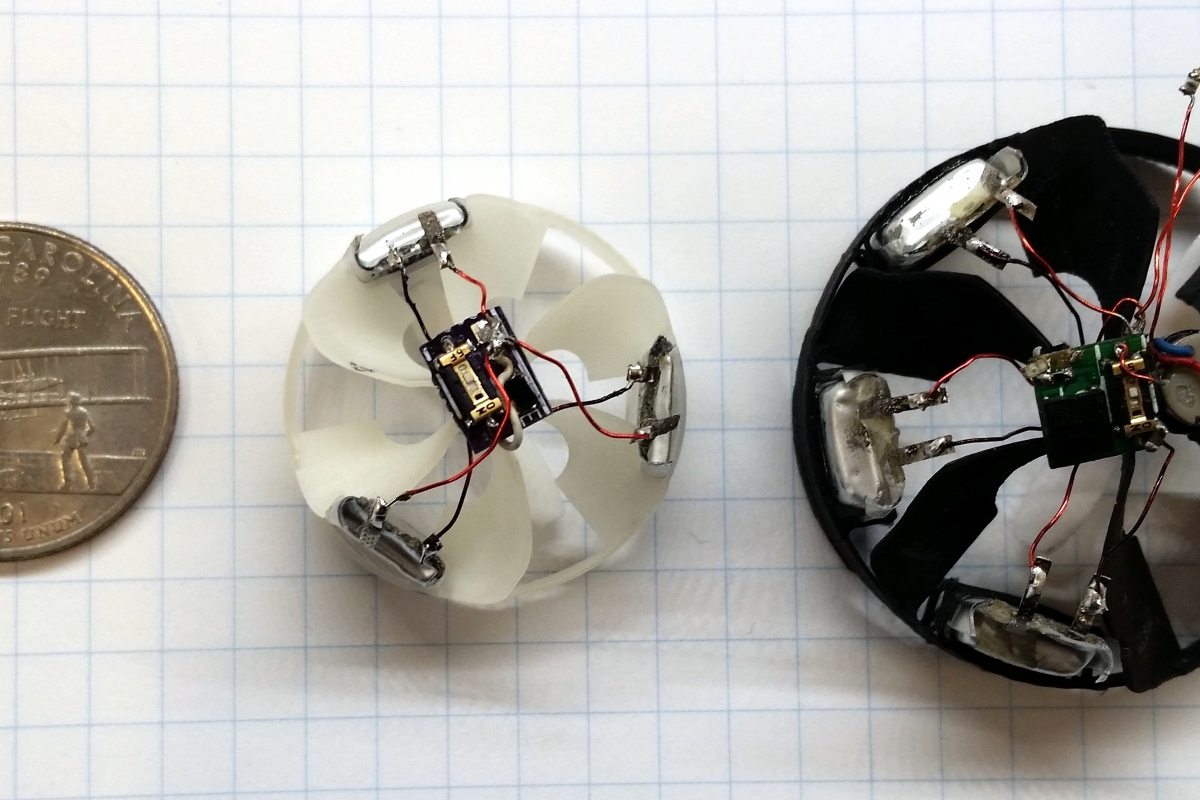
Piccolissimo has just one motor and two rigid bodies, which are propellers that spin in opposite directions. The mass distribution and relative rotor speeds are designed to maintain passive stability in hover. Cartesian velocity control is obtained by introducing an asymmetry in the rotation axis of the two rotating bodies and pulsing the thrust at appropriate times. The vertically controllable version is 28 mm in the largest dimension and the Cartesian controllable version is 39 mm in the largest dimension.