Variable Topology Truss
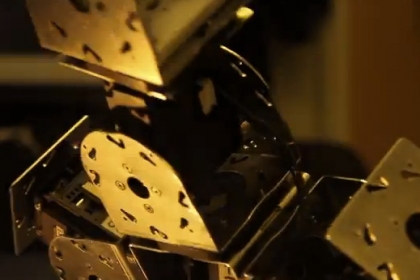
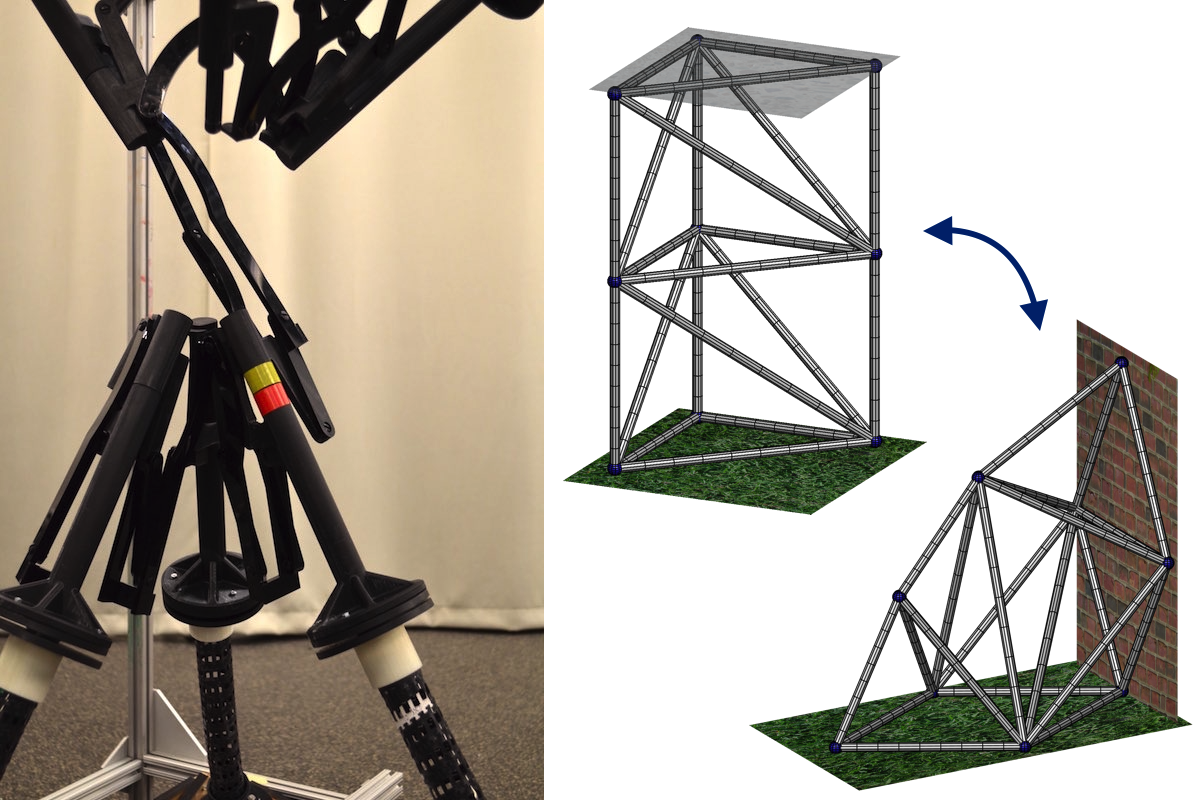
Variable Topology Trusses (VTT) are robots in a new class of self-reconfigurable robot. A VTT consists of linear actuators for the truss members, which are joined at the truss nodes by a special reconfigurable spherical joint. The VTT can reconfigure by merging and splitting these truss nodes. This reconfigurability allows a single robot to address a wide variety of tasks. For example, we envision a VTT being used as an adaptable shoring robot for disaster response scenarios. We have characterized the reconfigurability of VTTs at a high level, and we are currently working on the motion and reconfiguration planning problem for VTTs. We are also building a hardware prototype using the Spiral Zipper actuator and the new spherical joint.