Origami-Inspired Swimming Robot
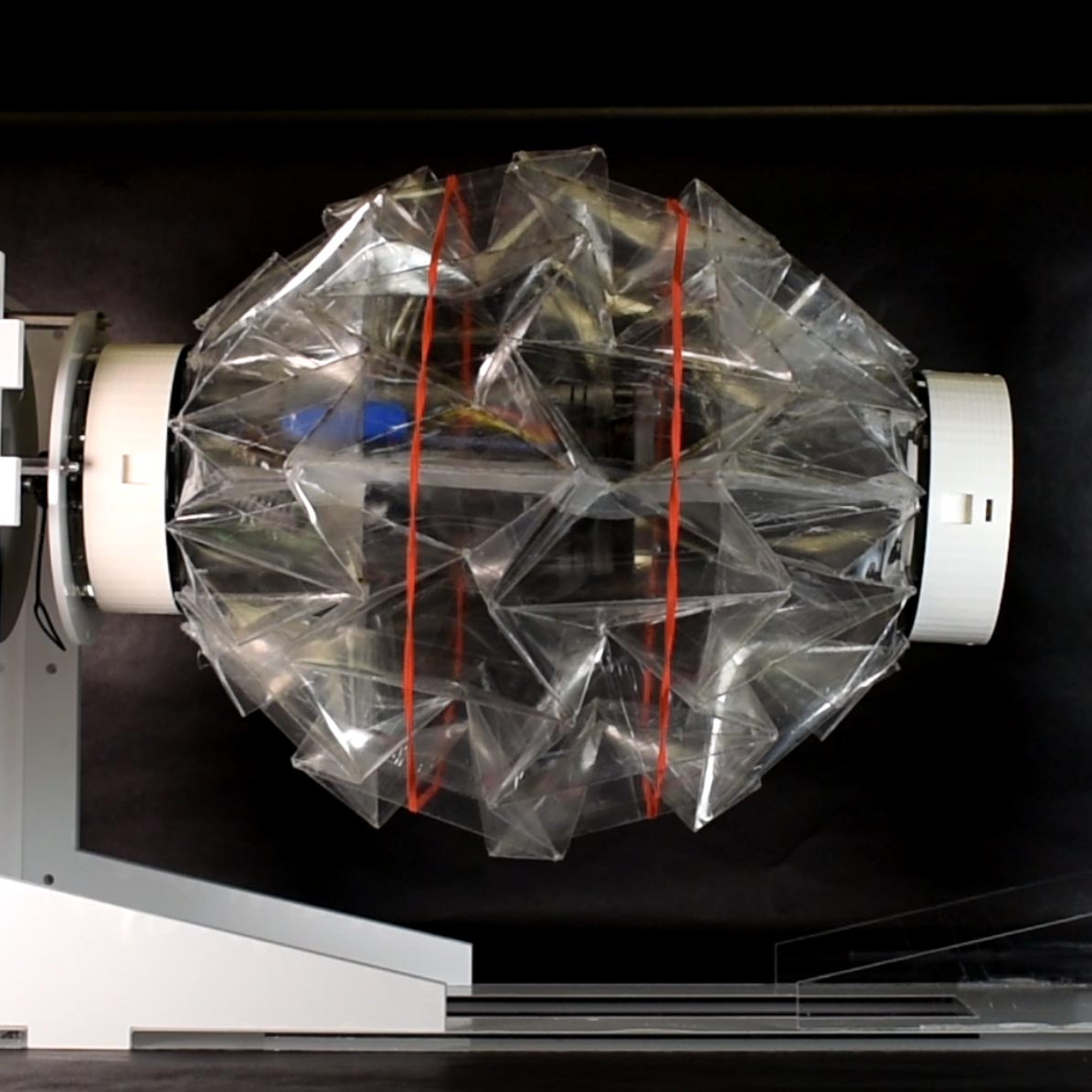
Underwater swimmers present unique opportunities for using bodily reconfiguration for self-propulsion. Origami-inspired designs are low-cost, fast to fabricate, robust, and can be used to create compliant mechanisms useful in energy-efficient underwater locomotion. In this project, we demonstrate an origami-inspired robot that can change its body shape to ingest and expel water, creating a jet that propels it forward similarly to cephalopods. We use the magic ball origami pattern, which can transform between ellipsoidal (low volume) and spherical (high volume) shapes. A custom actuation mechanism contracts the robot to take in fluid, and the inherent mechanics of the magic ball returns the robot to its natural shape upon release. We describe the design and control of this robot and verify its locomotion in a water tank. The resulting robot is able to move forward at 6.7 cm/s (0.2 body lengths/s), with a cost of transport of 2.0.
Video: https://www.youtube.com/watch?v=cZ1nx_kOw3w
The project is supported in part by NSF Grant No. 2121887. The opinions, findings, and conclusions, or recommendations expressed are those of the author(s) and do not necessarily reflect the views of the National Science Foundation.
Robotics MSE Accelerated Master's '24; Embedded Hardware Engineer, Booz Allen Hamilton