NEXT EVENT Fall 2025 Robotics MSE Thesis Lightning Talks and Poster Session
Autonomous Service Robots
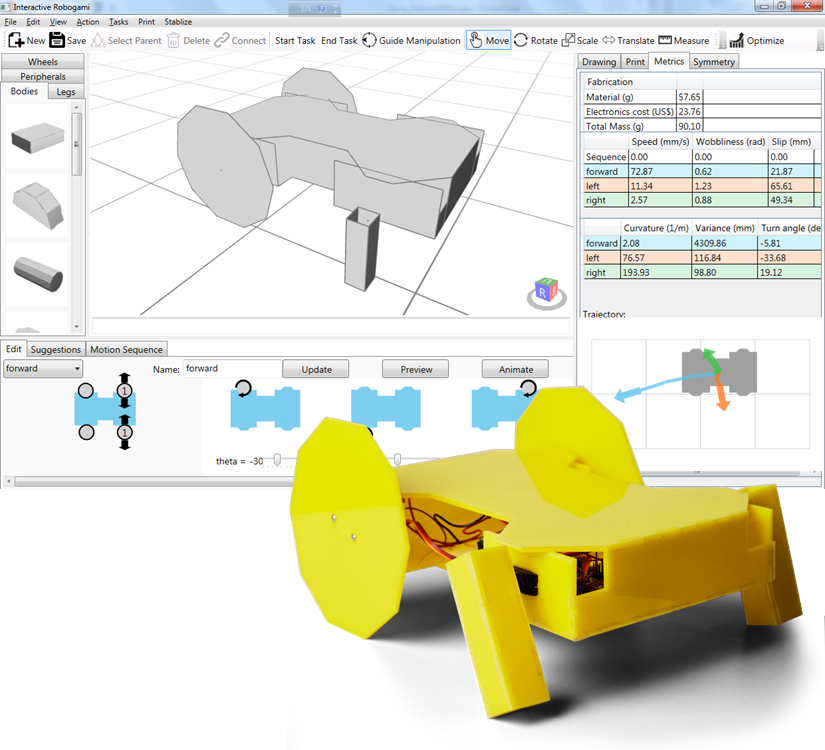
Build-a-Bot: Computer-Aided Interactive Robot Design
CaDeX: Learning Canonical Deformation Coordinate Space for Dynamic Surface Representation via Neural Homeomorphism
Collaborative Swimming using Modboats
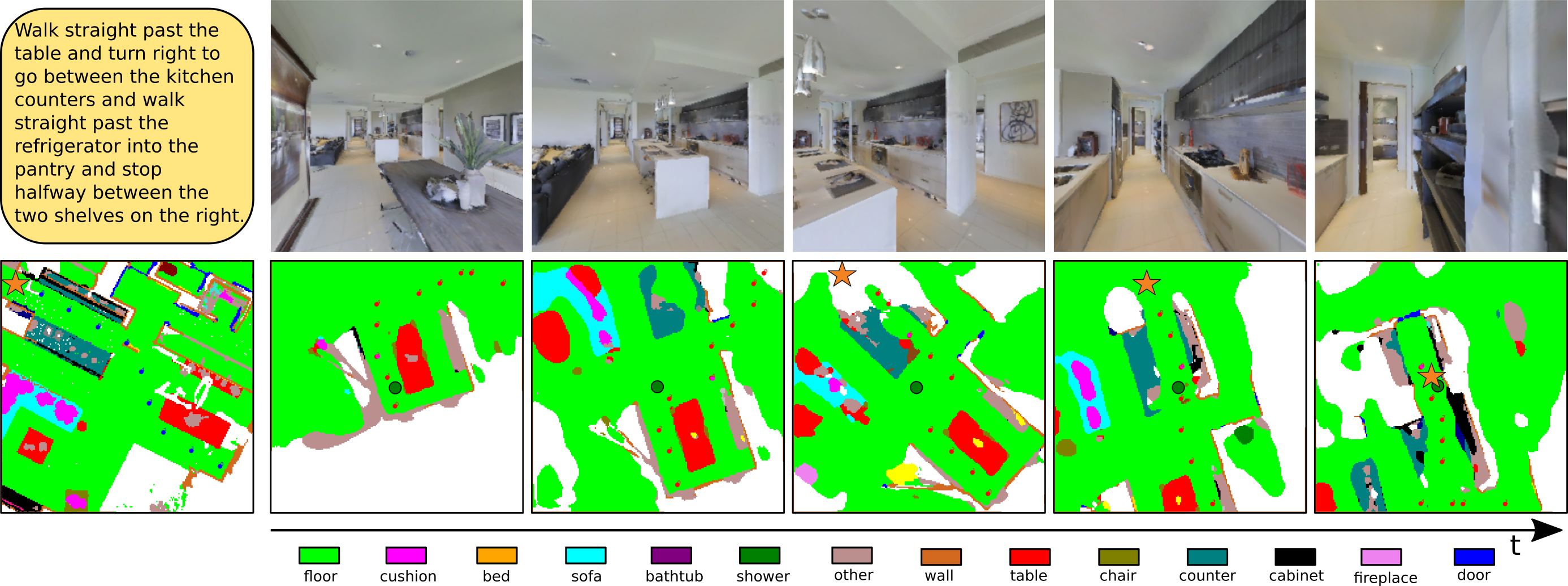
Cross – modal Map Learning for Vision and Language Navigation
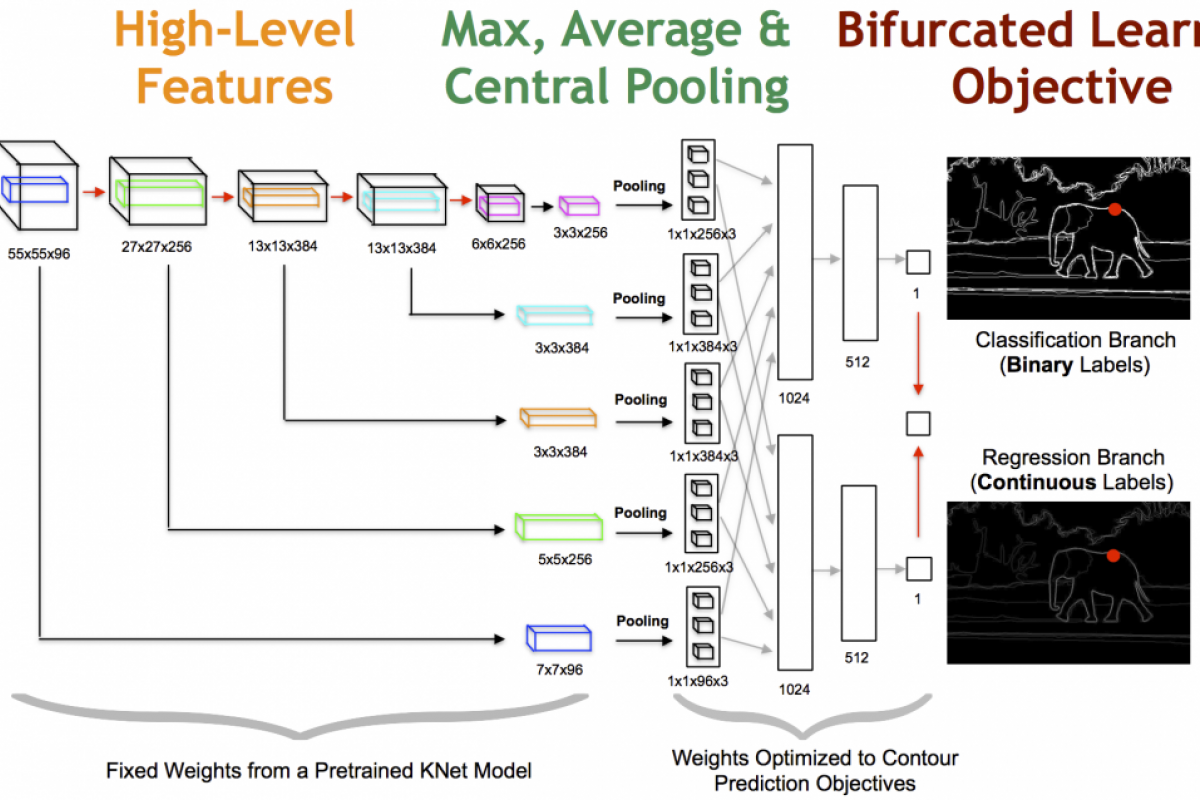
DeepEdge: A Multi-Scale Bifurcated Deep Network for Top-Down Contour Detection
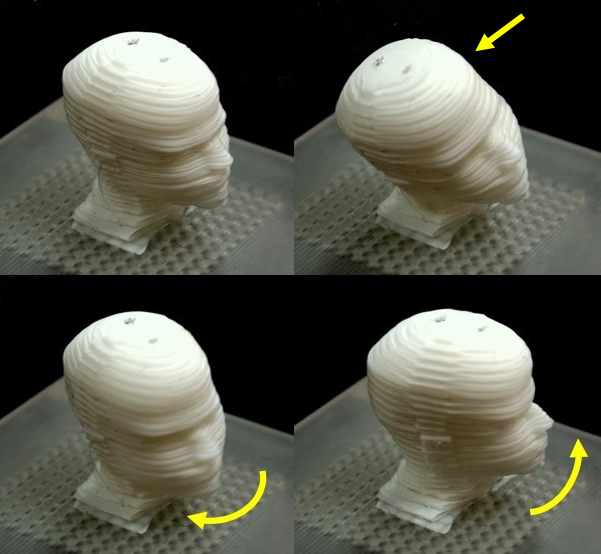
Designable Compliance for Soft and Semi-Rigid Robots Capable of Dynamical Behaviors
Flying Gripper
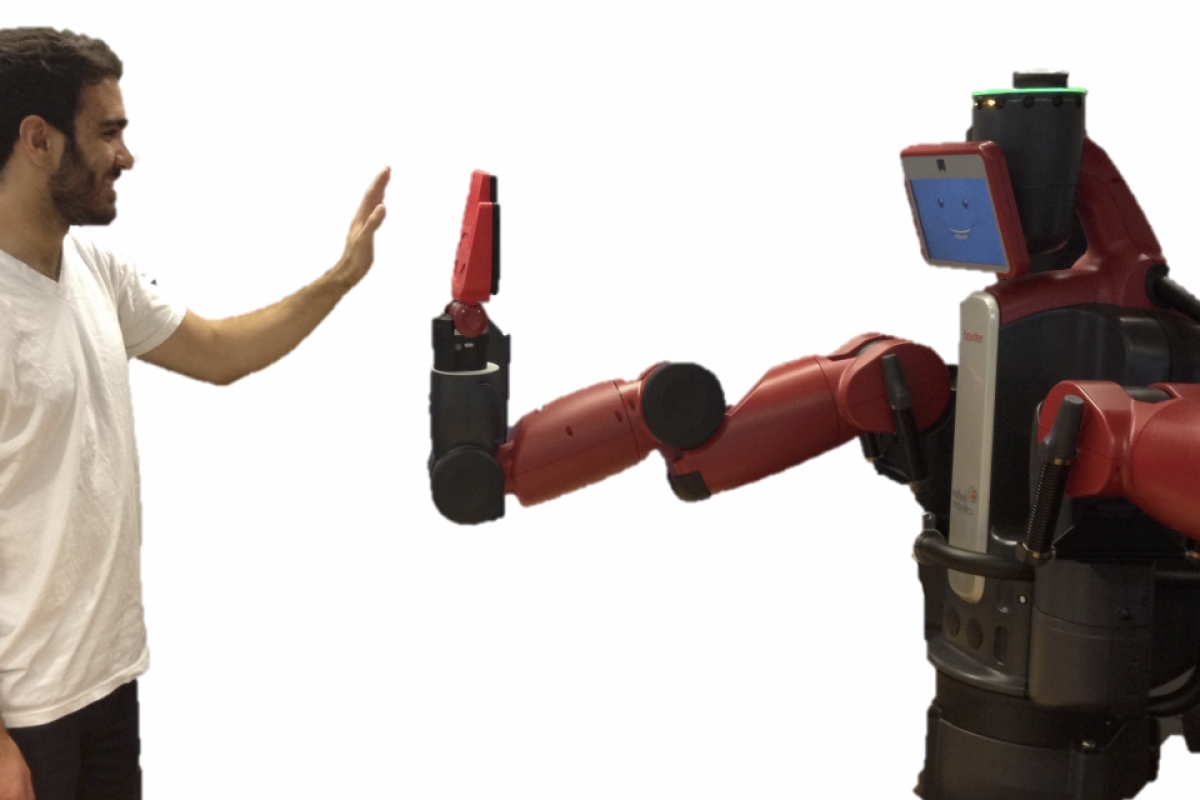
Haptics in Human-Robot Interaction
Human-Robot Coordinated Manipulation and Transportation
Large-scale Autonomous Flight with Real-time Semantic SLAM under Dense Forest Canopy
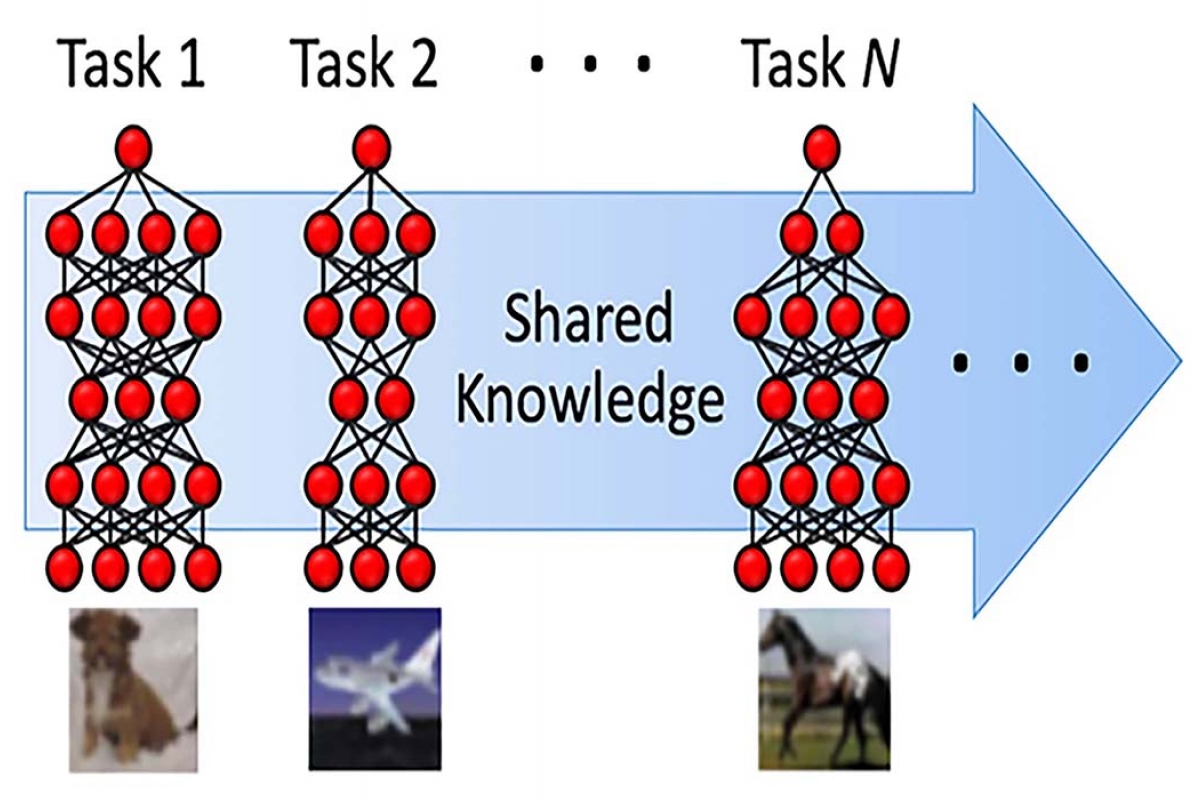
Lifelong Deep Learning