Rapid Fabrication and Assembly of Folding Machines
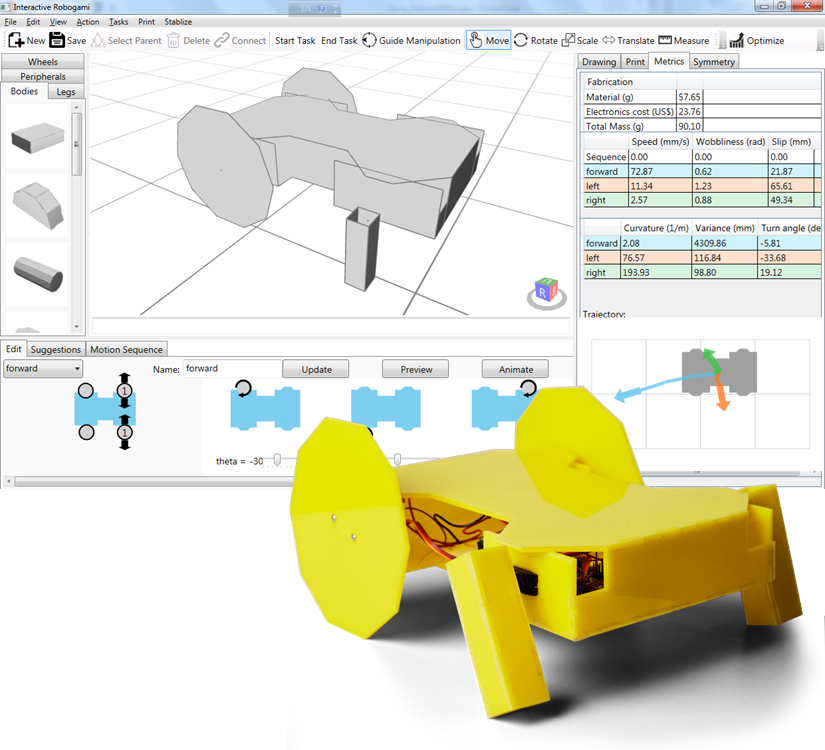
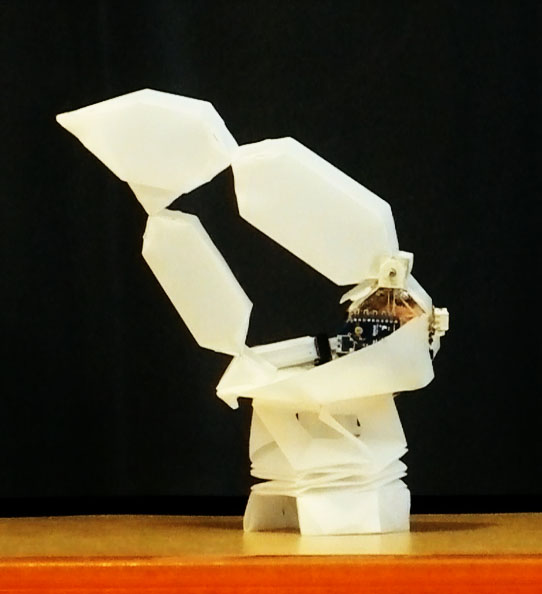
We investigate new ways to use and combine existing digital manufacturing tools such as 3D printing, lamination, and origami-inspired assembly to construct robots within hours. Print-and-fold manufacturing promises customizable robots with embedded actuation, sensing, and electronics. These processes create devices that are low-weight, low-power, and low-cost, and that can produce complex behaviors with relatively simple actuation requirements. Due to inbuilt compliance and alterable crease pattern parameters, different behaviors can be programmed directly into the bodies of these robots.
We create new systems for streamlining this fabrication by embedding fabrication constraints into computational tools, automatically converting designs into valid plans that can be sent straight to the printer. We develop reduced-order models to predict the behavior of the fabricated structures and to design origami-inspired robots for particular tasks. By taking advantage of active materials such as shape memory polymers, we also develop new self-folding and self-assembly processes to turn virtual robot designs into physical designs with minimal human assembly.
Our current active projects include:
- Distributed actuation using smart materials embedded into a multi-layer origami pattern, enabling active stiffness control in a soft robotic manipulator and an adjustable pulmonary artery band
- Design of origami mechanisms for minimal actuation in applications including jumping and swimming
- Modeling of curved crease patterns for achieving desired folding motions while minimizing origami pattern complexity
- Design and fabrication approaches for self-folding of complex origami patterns requiring sequential folding