Published by IEEE Spectrum
Authored by Evan Ackerman
No matter how much brilliant work the folks at NASA and JPL put into their planetary exploration robots (and it’s a lot of brilliant work), eventually, inevitably, they break down. It’s rare that these breakdowns are especially complicated, but since the robots aren’t designed for repair, there isn’t much that can be done. And even if (say) the Mars rovers did have the ability to swap their own wheels when they got worn out, where are you going to get new robot wheels on Mars, anyway?
And this is the bigger problem—finding the necessary resources to keep robots running in extreme environments. We’ve managed to solve the power problem pretty well, often leveraging solar power, because solar power is a resource that you can find almost anywhere. You can’t make wheels out of solar power, but you can make wheels, and other structural components, out of another material that can be found just lying around all over the place: ice.
In a paper presented at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Devin Carroll and Mark Yim from the GRASP Lab at the University of Pennsylvania, in Philadelphia, stress that this is very preliminary work. They say they’ve only just started exploring the idea of a robot made of ice. Obviously, you’re not going to be able to make actuators or batteries or other electronics-y things out of ice, and ice is never going to be as efficient as a structural material as titanium or carbon fiber or whatever. But ice can be found in a lot of different places, and it’s fairly unique in how it can be modified—heat can be used to cut and sculpt it, and also to glue it to itself.
The IROS paper takes a look at different ways of manufacturing robotic structural components from ice using both additive and subtractive manufacturing processes, with the goal of developing a concept for robots that can exhibit “self-reconfiguration, self-replication, and self-repair.” The assumption is that the robot would be operating in an environment with ice all over the place, where the ambient temperature is cold enough that the ice remains stable, and ideally also cold enough that the heat generated by the robot won’t lead to an inconvenient amount of self-melting or an even more inconvenient amount of self-shorting. Between molding, 3D printing, and CNC machining, it turns out that just cutting up the ice with a drill is the most energy efficient and effective method, although ideally you’d want to figure out a way of using it where you can manage the waste water and ice shavings that result so that they don’t refreeze somewhere you don’t want them to. Of course, sometimes refreezing is exactly what you want, since that’s how you do things like place actuators and attach one part to another.
IceBot is a proof-of-concept Antarctic exploration robot that weighs 6.3 kg. It was made by hand, and the researchers mostly just showed that it could move around and not immediately fall to pieces even at room temperature. There’s a lot to do before IceBot can realize some of those self-reconfiguration, self-replication, and self-repair capabilities, but the researchers are on it. And for more about that, we spoke with lead author Devin Carroll via email.
IEEE Spectrum: Where did this idea come from, and why do you think it hasn’t been tried before?
Devin Carroll: The first robot I designed was a tram robot for ecologists to use to survey forests. One of the challenges to making robots for this field is not only are robots expensive but the natural elements will break them given time. Mark and I started exploring the idea of building robots from found material as a way to add robustness to robotic systems operating in remote or hostile environments with a secondary goal of reducing the cost of the system. We ultimately settled on ice because of the design flexibility it affords us and the current interest in icy, remote environments. Climate change has many folks interested in the Antarctic and ice sheets while NASA and other space exploration groups are looking to the stars for ice and water. Therefore, ice felt like the most logical step—if we could build a robot from ice, perhaps it could be used to assist in exploring icy planets for life and data collection.
I would argue this hasn’t been done before because of the uncertainty that using ice brings. Unlike traditional building material, the designer does not know a priori what conditions will cause the ice to fail—we can make an educated guess, but the margin for error is much higher. There are also complications associated with making the robot and getting it to the site safely. If we build it and then ship it to the deployment site it must be kept cold throughout its journey whereas if we make it at the deployment site we must also ship a manufacturing site with the system, increasing the overall monetary and energy costs associated with the system.
Can you speculate about what an arctic (or planetary) exploration robot might look like if it incorporated a self modification or repair capability?
When I think of an arctic (or planetary) exploration robot that incorporates self-modification or repair capabilities I envision a system with two types of robots—the first explores the environment and collects materials needed to perform self-augmentation or repair, and the second is some sort of manipulator/manufacturing system. We can envision the exploration class of robot returning to a centralized location with a request for a plow or some other augmentation and the manufacturing system will be able to attach the augmentation directly to the robot. Similarly with repair—if, for example, a robot recognizes a crack, the manipulator would be able to patch the crack using an ice band-aid of sorts, sealing the crack and
preventing it from propagating further.
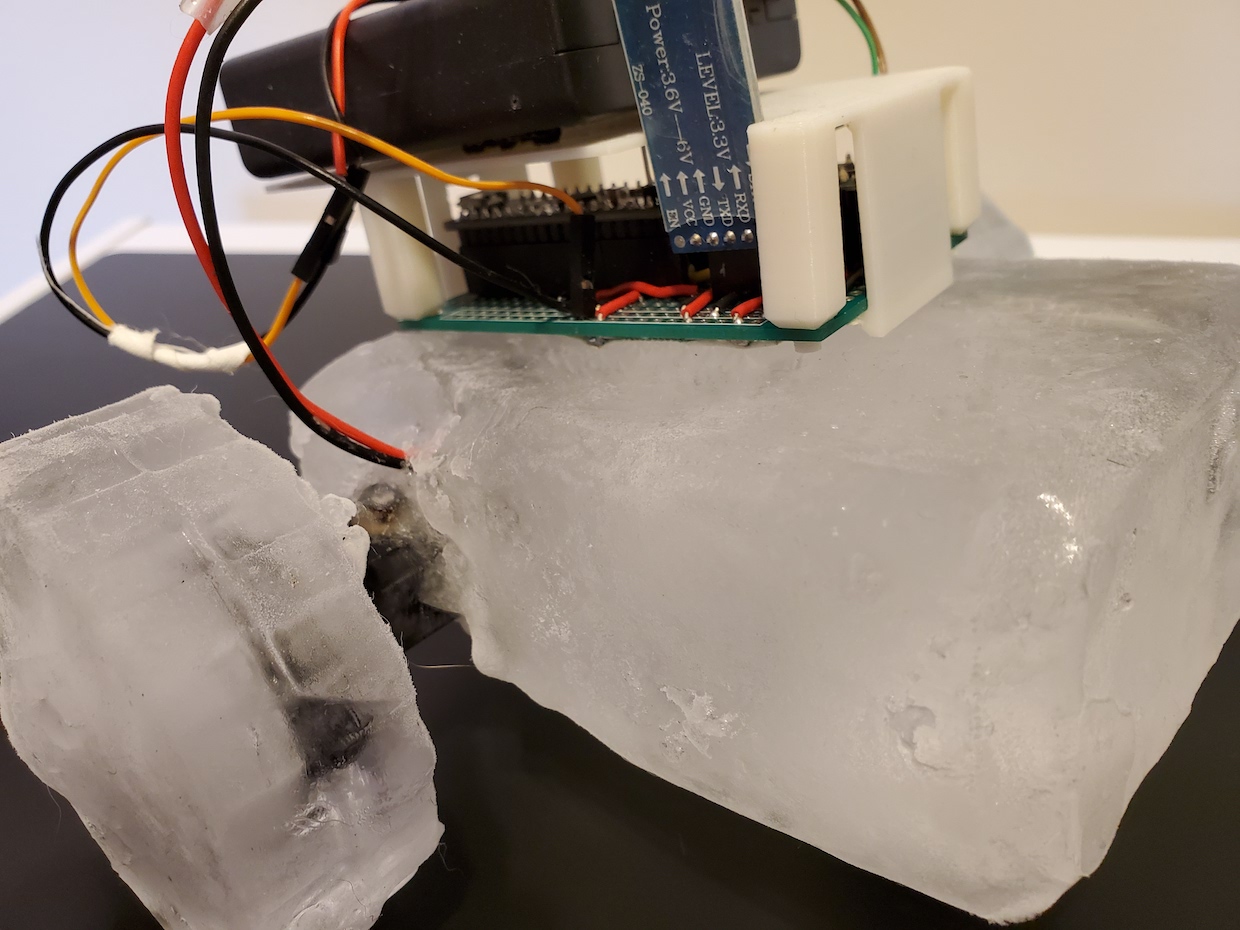
Part of my dissertation includes work towards this effort. In terms of the manipulator/end effector design, one idea we are exploring is using a mesh of resistance wire to locally melt surfaces of ice blocks and create a temporary connection between the block of ice and manipulator while we maneuver and machine it to a desired geometry.
What are you working on next?
My immediate focus is on designing a modular joint we can use to easily and securely join actuators with blocks of ice as well as working to develop an end effector that will allow us to manipulate blocks of ice without permanently deforming them via screw holes or other, similar connection methods. One of the interesting design challenges with these directions is ensuring that we maximize the connection strength while minimizing the energy use to implement them. Especially in remote environments, energy is a valued commodity and systems like the one I’ve described will only be effective if we take energy into consideration when designing them.
Featured People
PhD, MEAM '23, Lecturer at University of Pennsylvania, MEAM
Director, GRASP Lab; Faculty Director, Design Studio (Venture Labs); Asa Whitney Professor, MEAM