NEXT EVENT Fall 2025 GRASP SFI: Tairan He, Carnegie Mellon University &…
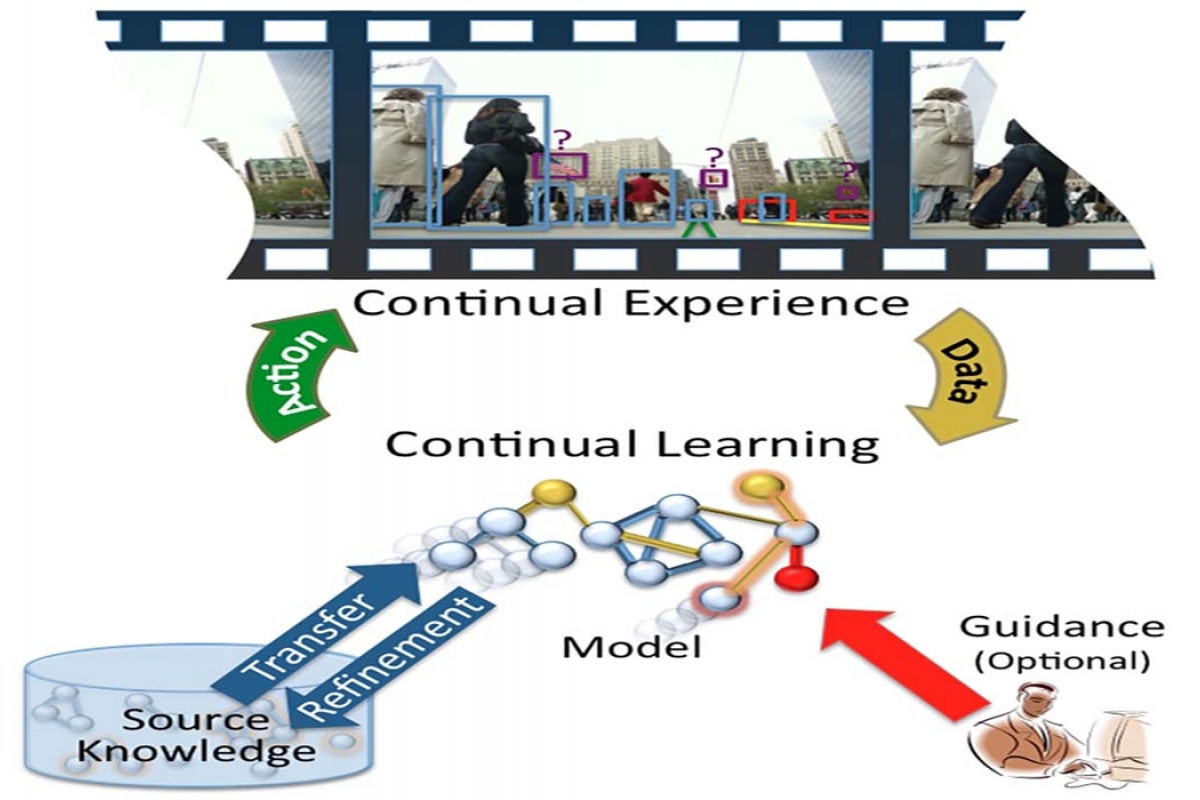
Lifelong Learning of Perception and Action in Autonomous Systems
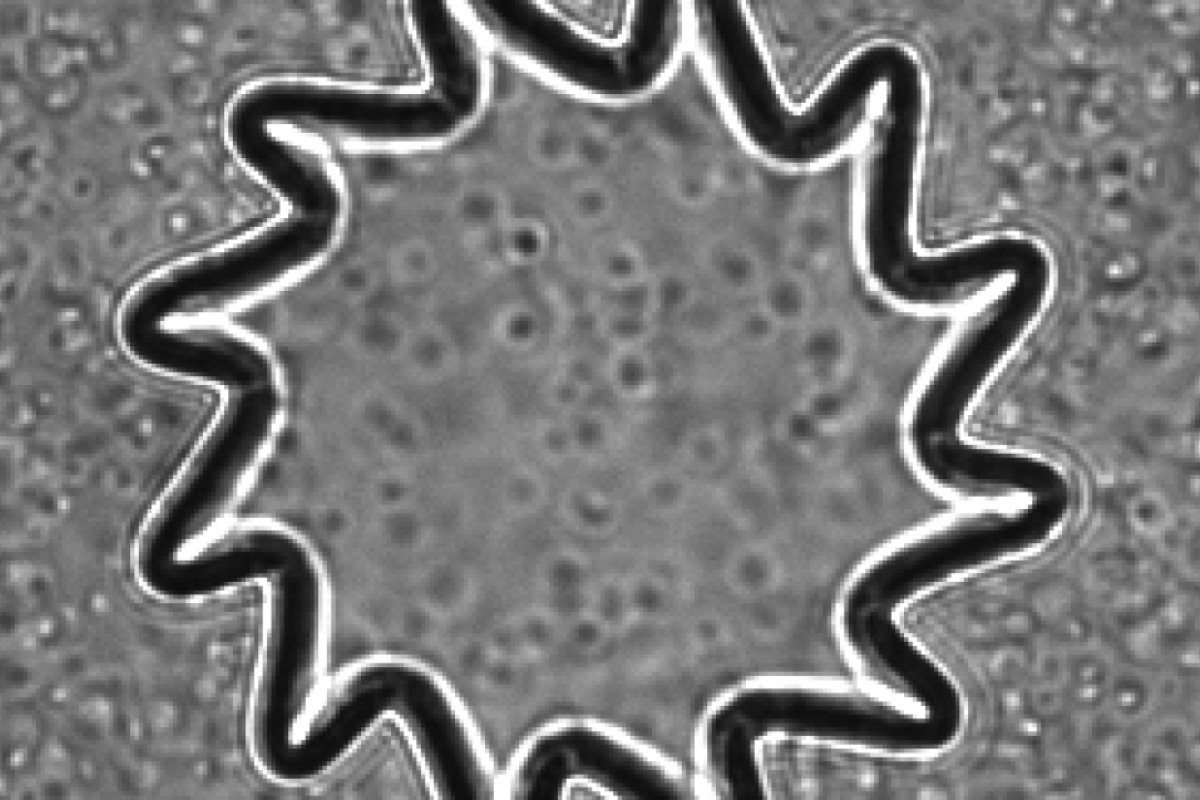
Micro Bio Robots
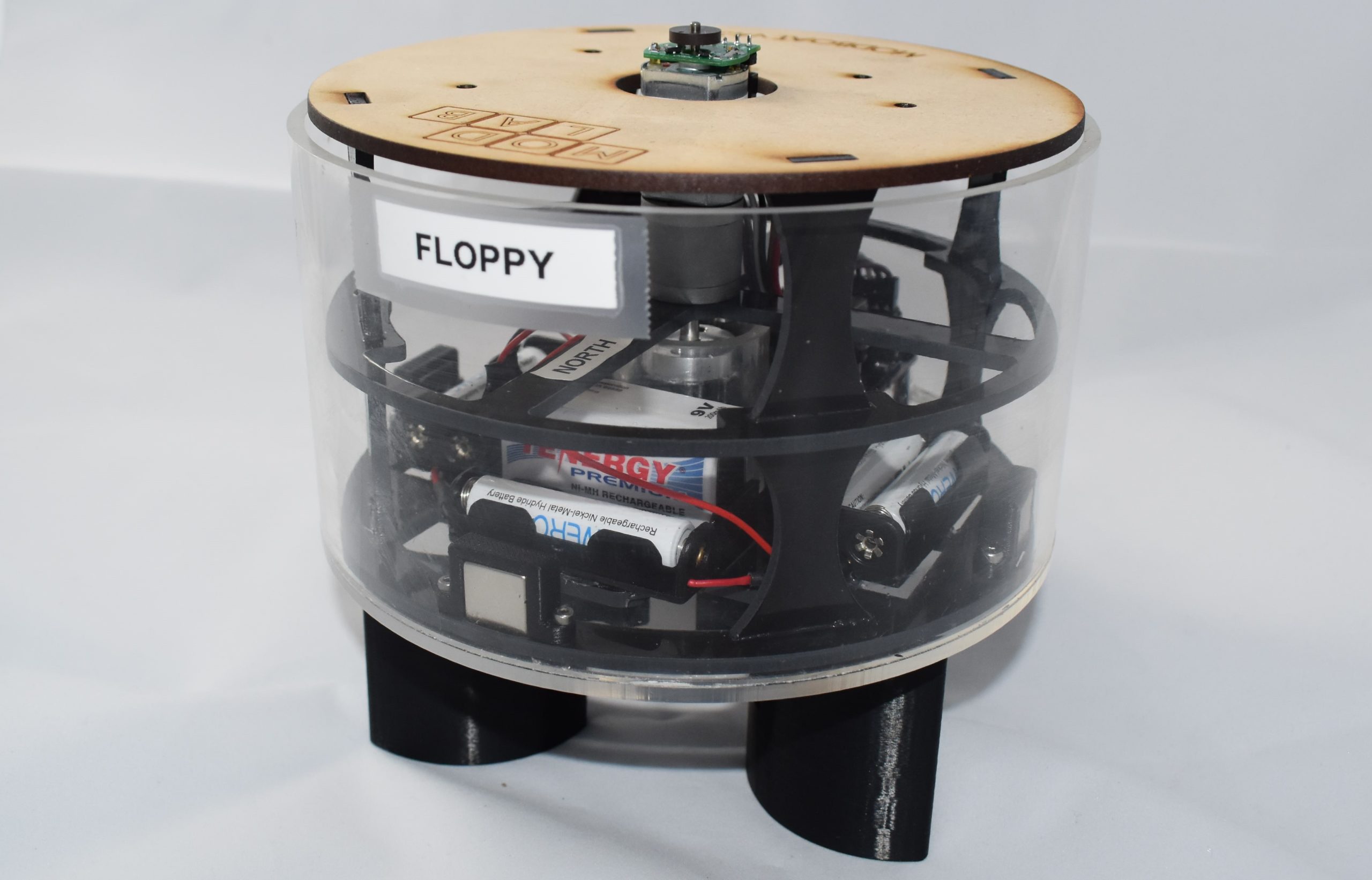
Modboats
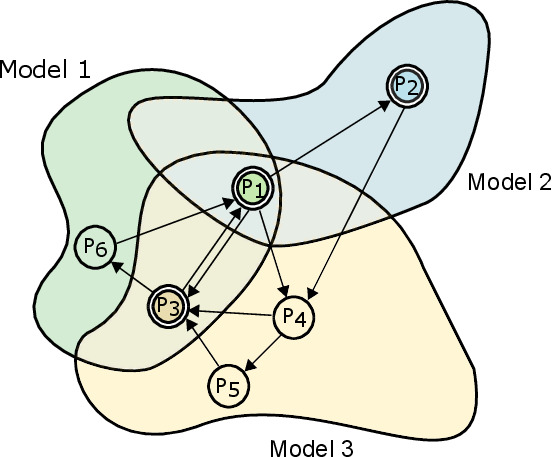
Model Zoo: A Growing “Brain” that Learns Continually
Modeling, Planning, and Control for Reconfigurable Robots
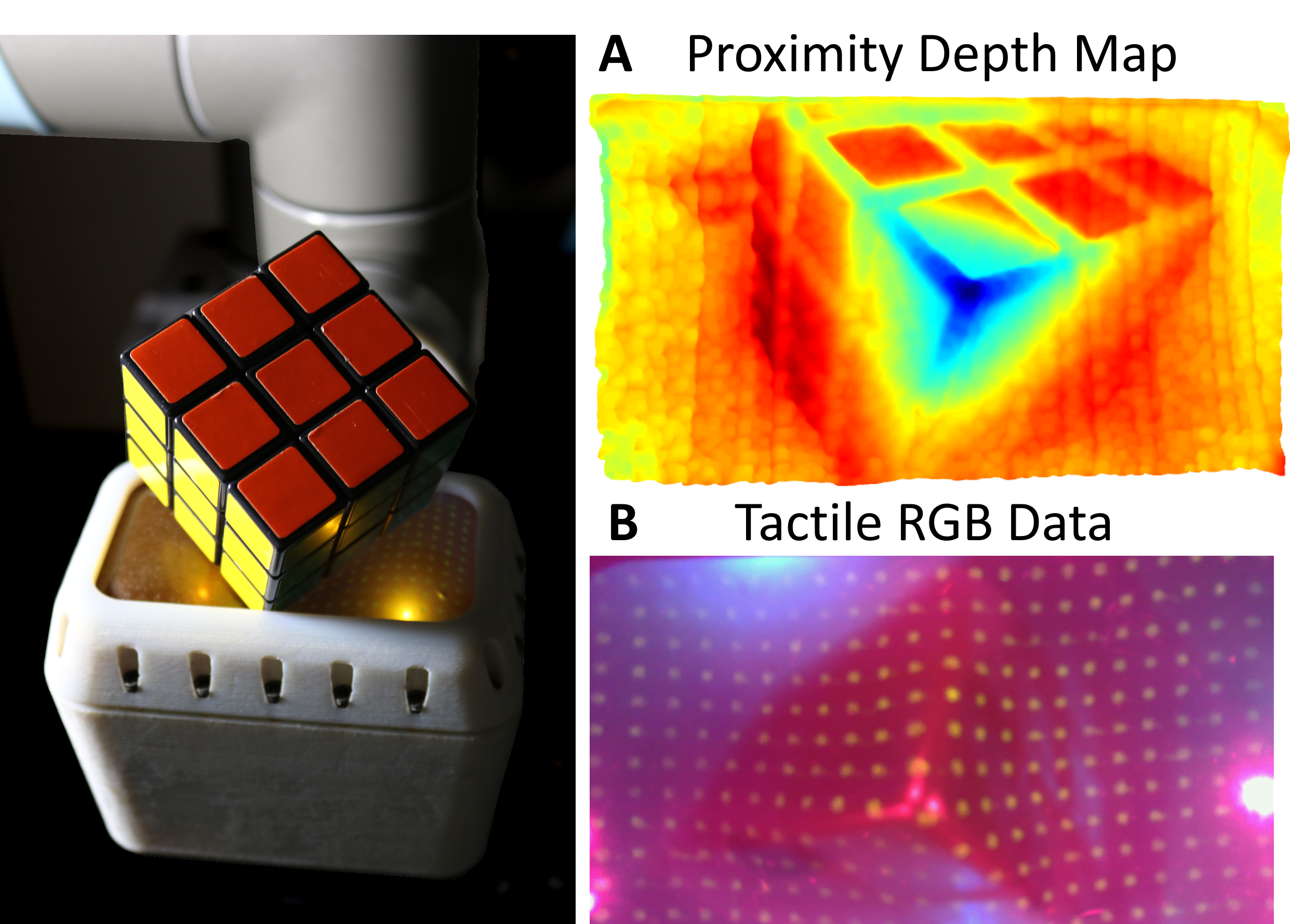
Multimodal Proximity and Visuotactile Sensing with a Selectively Transmissive Soft Membrane
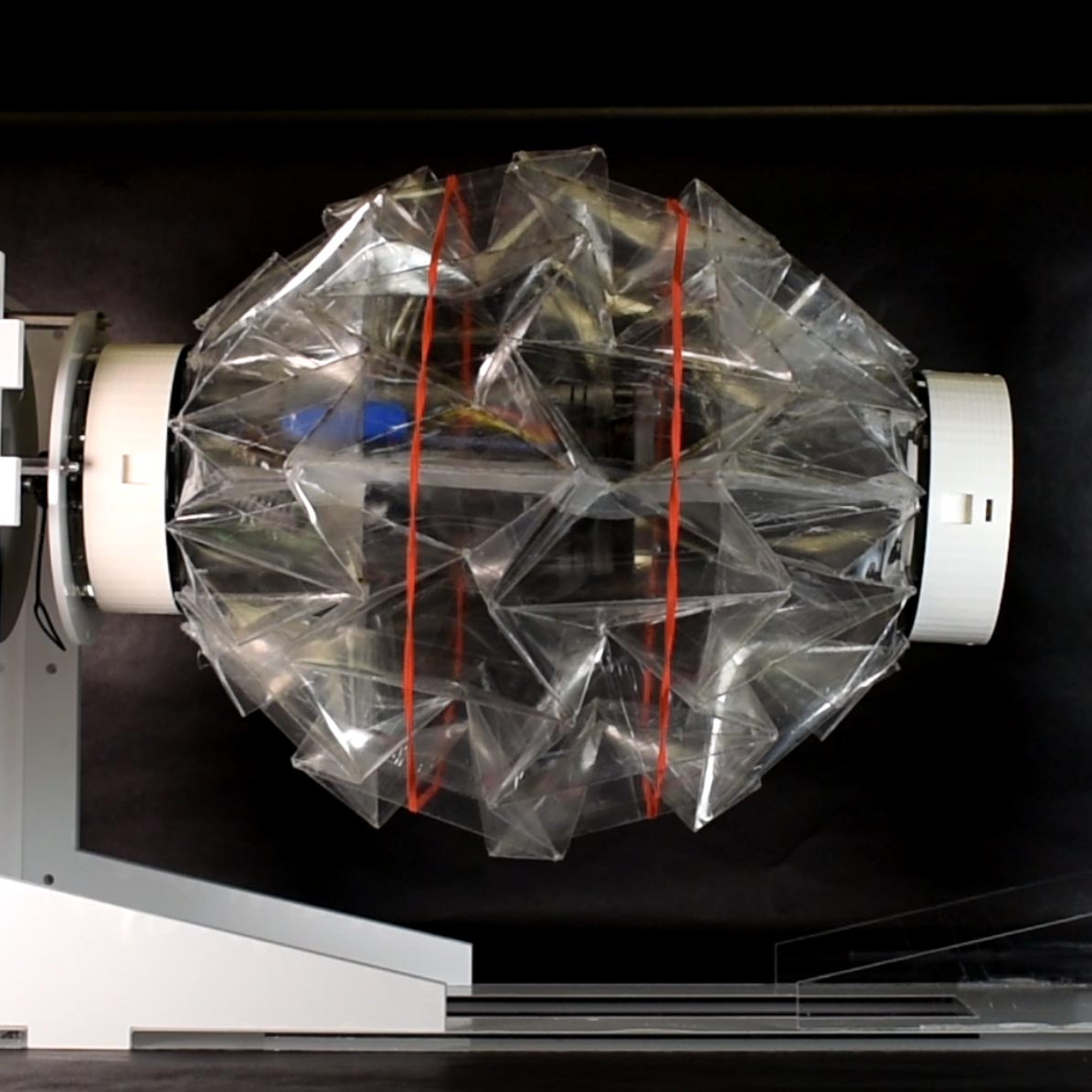
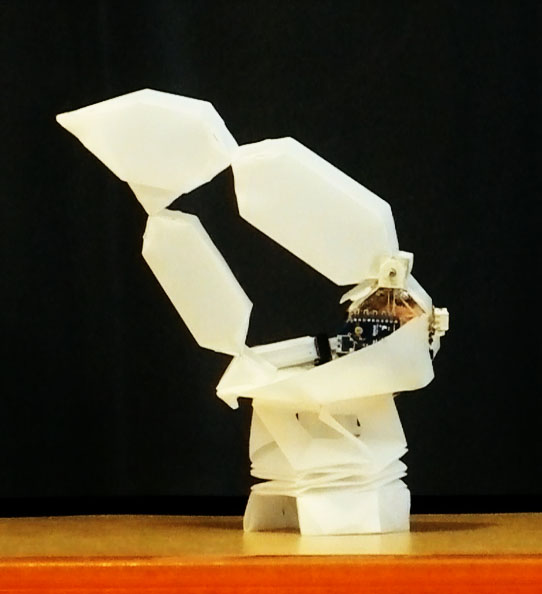
Origami-Inspired Swimming Robot
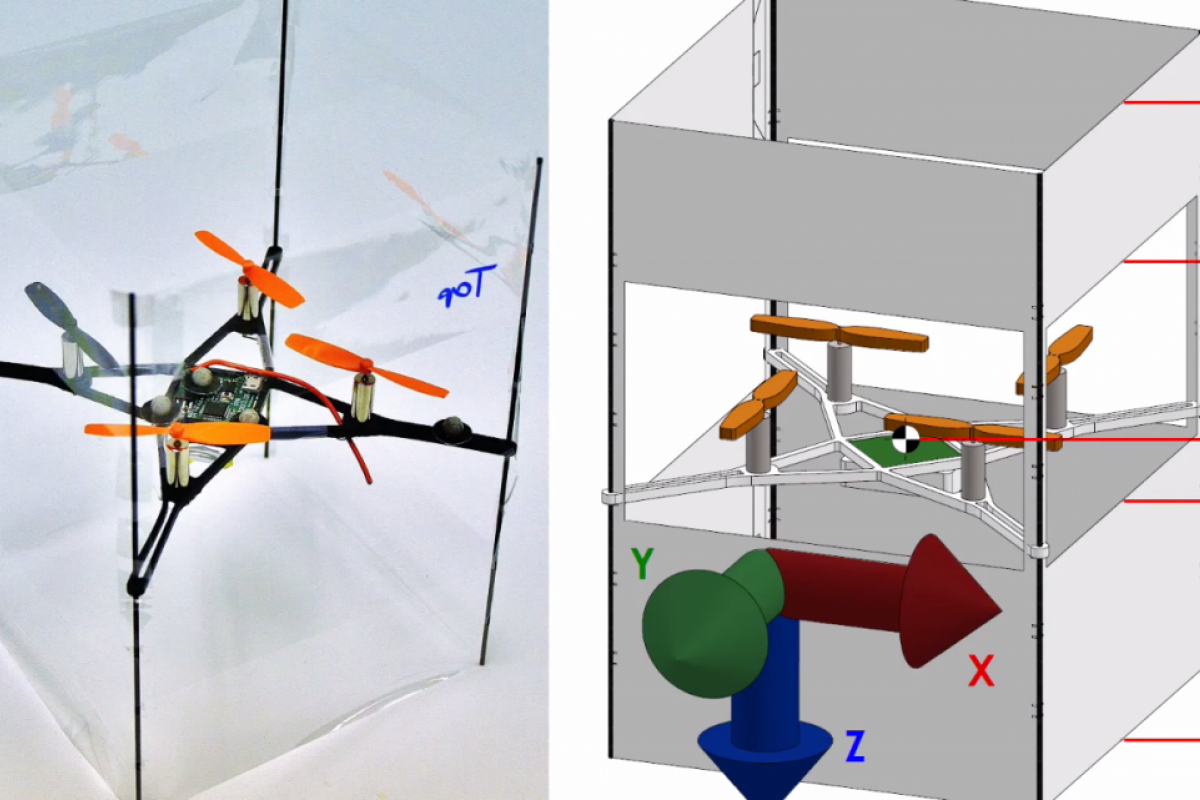
Passive stability of MAVs Without Angular Momentum
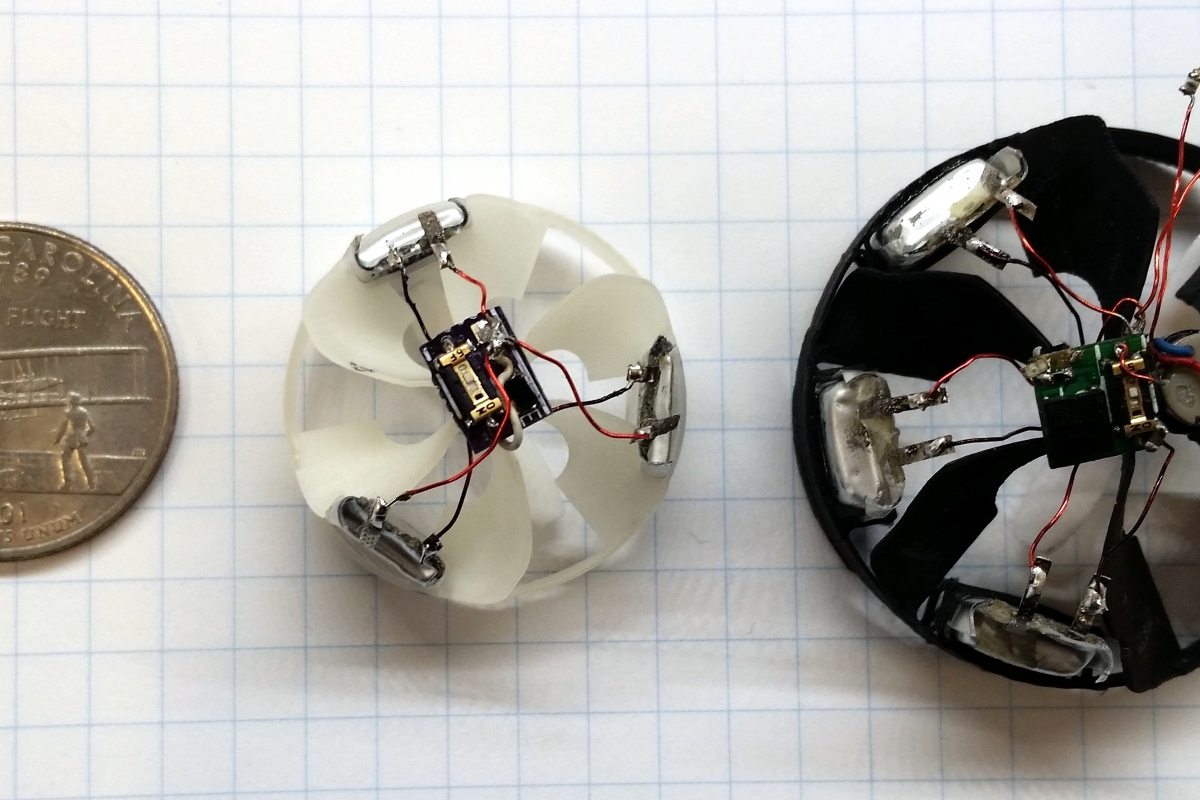
Piccolissimo
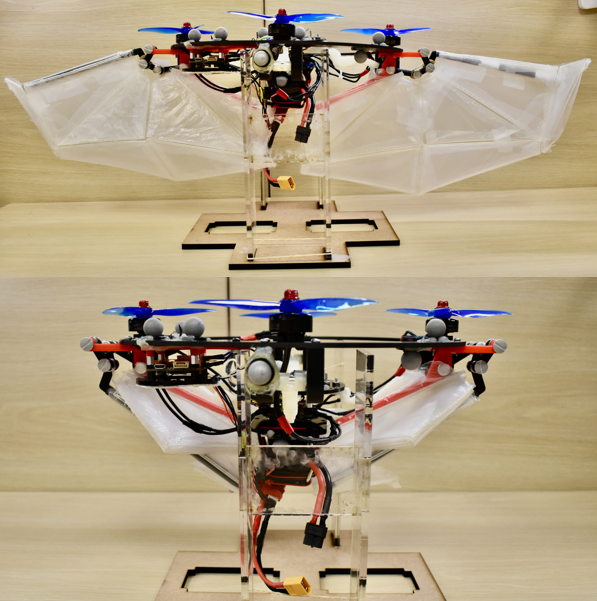
Project Birdhouse
Rapid Fabrication and Assembly of Folding Machines
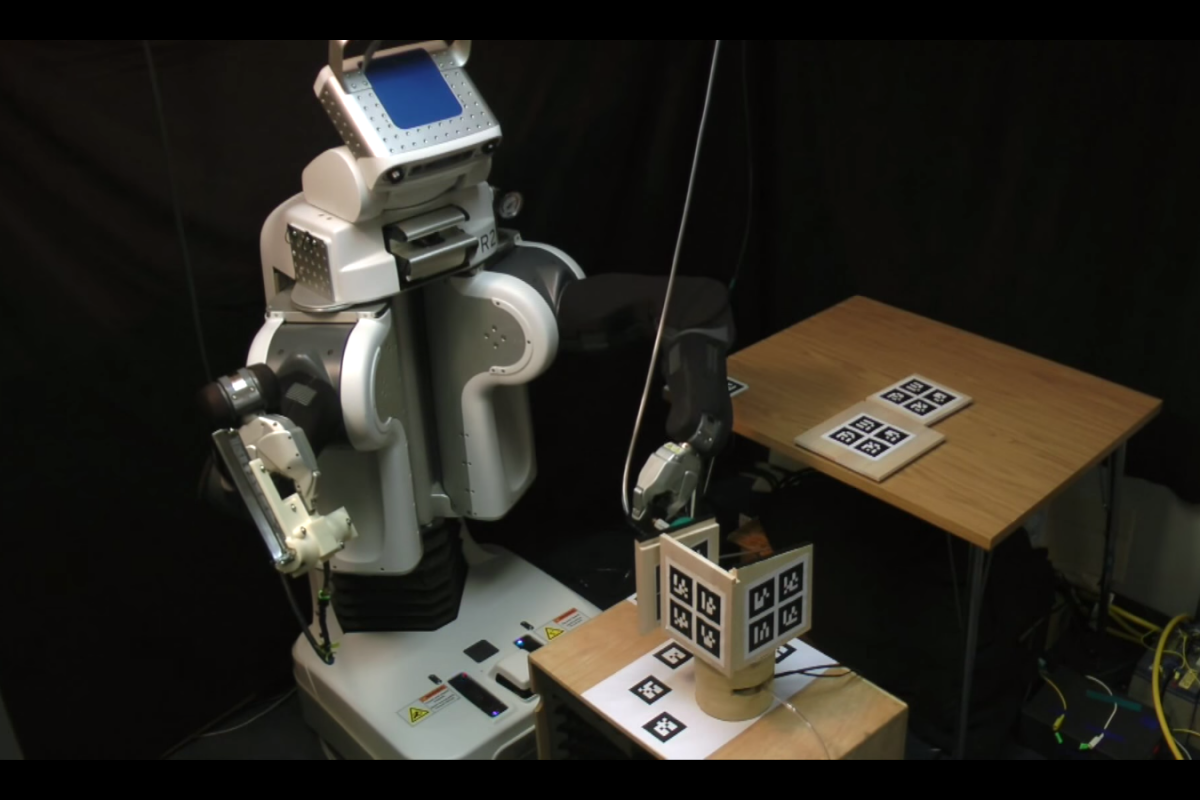
Smartphones Power Flying Robots