Variable Topology Trusses (VTT)
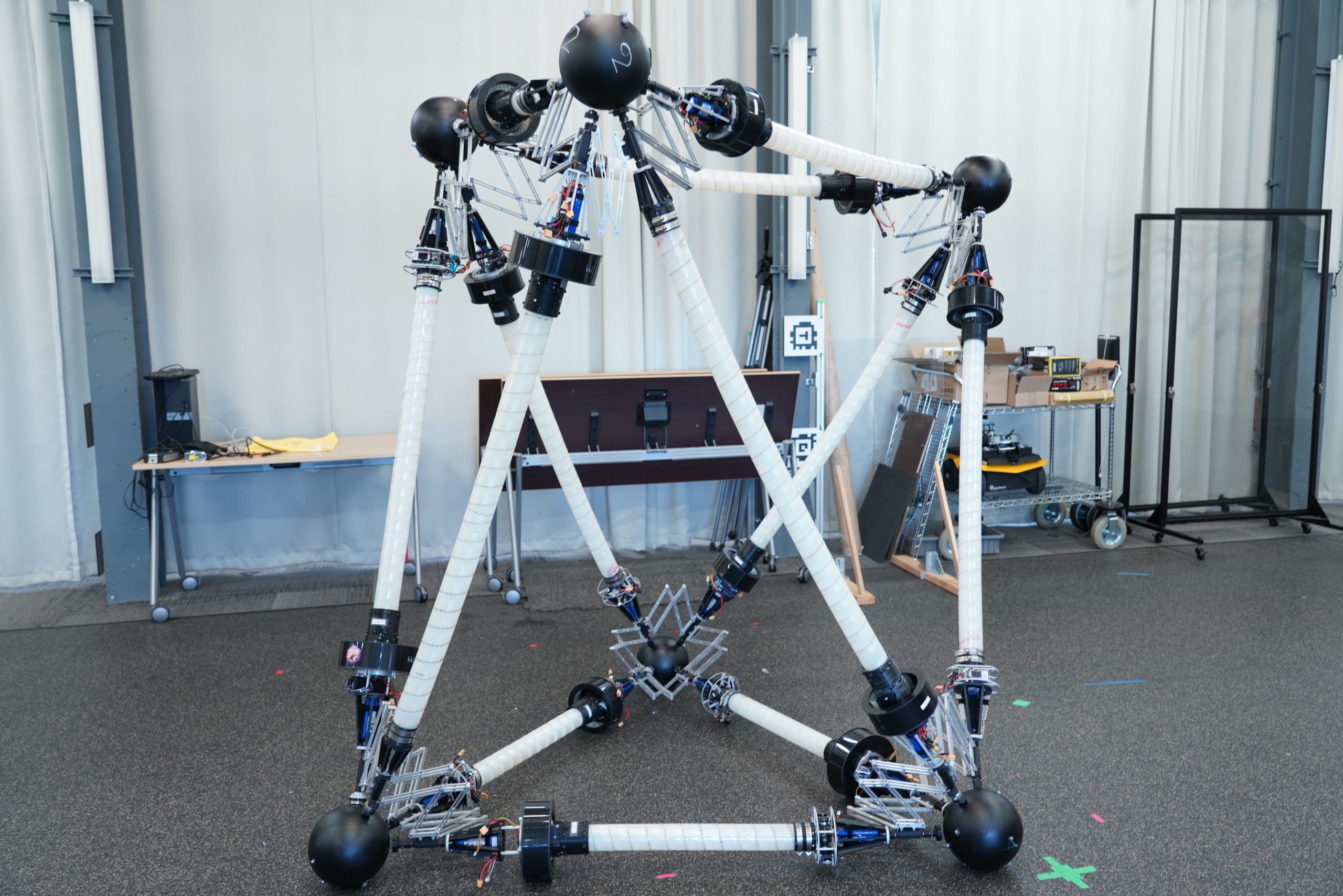
Variable Topology Trusses (VTT) are a new type of modular self-reconfigurable robot. A VTT is composed of linear actuator modules that are connected together to form a truss using reconfigurable joints. The linear actuator modules are built using the Spiral Zipper actuator, which has an extremely high extension ratio to enable large changes to the size and shape of the truss. To achieve even greater versatility, a VTT can use special reconfigurable spherical joints to change the connections between modules and modify the overall truss topology. Compared to conventional lattice and chain style modular robots, the highly parallel truss architecture of VTT is much more structurally efficient for supporting loads and applying forces. One application of VTT is to form a temporary support structure to shore up damaged buildings, protecting rescuers during a search and rescue operation. (Read more here)
Director, GRASP Lab; Faculty Director, Design Studio (Venture Labs); Asa Whitney Professor, MEAM