Sung Robotics Lab
Cynthia Sung
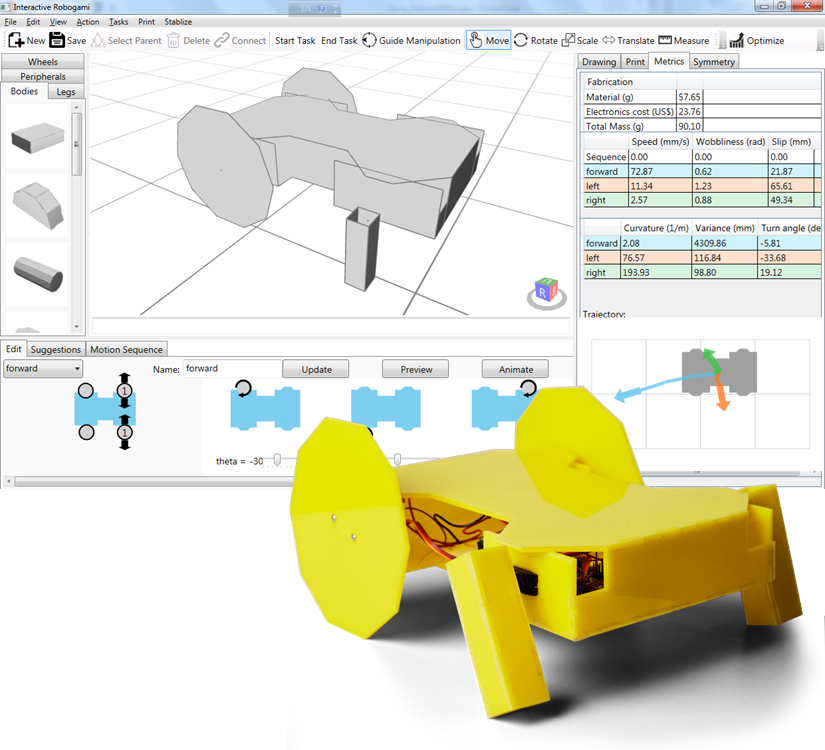
Our group is interested in advancing the state of the art in computational methods for robot design and deployment, with a particular focus on soft and compliant robots. By combining methods in computational geometry with practical engineering design, we develop theory and systems for making robot design and fabrication intuitive and accessible to the non-engineer. Our work lies at the intersection of four major areas:
- Computational Robot Design
- Soft and Semi-Rigid Robotics
- Origami-Inspired Design and Fabrication
- Modeling and Control for Reconfiguration
For more information, visit our group’s website at https://sung.seas.upenn.edu/
Faculty
Staff
Students
Alumni
GRASP News
Student News
May 15, 2024
Recognizing GRASP Members’ Achievements at the Penn Engineering Graduate Awards Ceremony
May 11, 2023
Faculty News
How do you make robots more accessible to non-experts? This Penn researcher has some ideas
April 3, 2023