Written by Jillian Mallon
For the first time since 1988, the city of Philadelphia hosted the 2022 Institute of Electrical and Electronics Engineers (IEEE) International Conference on Robotics and Automation (ICRA) at the Pennsylvania Convention Center. This week-long event offered an exciting opportunity to showcase our breadth of work at GRASP.
While the general program for ICRA started on Monday, May 23rd, GRASP got a head start to the celebration with the GRASP Lab Alumni Reunion on Sunday, May 22nd from 7:00 PM to 9:30 PM at the Independence Visitors Center. The event was attended by over 200 GRASP alumni and current students and faculty. There was a wide array of hors d’oeuvres and drinks during the beginning of the event, after which attendees enjoyed a special guest performance by their very own Dr. Ruzena Bajcsy, GRASP Lab founder, who performed a waltz with her dance instructor from the Society Hill Dance Academy!

On the first day of the conference, Monday, May 23rd, GRASP hosted a technical tour showcasing many of GRASP’s research projects and some of our facilities at the Pennovation Center. The three-hour tour departed from the Pennsylvania Convention Center at 1:00 PM.
There were 30 stations set up throughout the Pennovation Campus outdoors and on the first and third floors of the Pennovation Center and Pennovation Building 200 that showcased 24 GRASP lab project demos and poster presentations as well as demos from six industry affiliates. The research spanned nine topics: mapping and localization, design and fabrication, learning-based control, computer vision, human-robot interaction, aerial vehicles, legged locomotion, and manipulation and swimming robots.
Outside of the Pennovation Center, DAIR Lab members William Yang and visiting MIT undergrad Zachary Francis demonstrated their recent results for dynamic walking and running on the Cassie bipedal robot. Prof. Rahul Mangharam’s group demonstrated the Autoware Autonomous Go-Kart. There were also outdoor stations with demonstrations from LF Intelligence and Ghost Robotics. Two food trucks were also set up in this area to provide refreshments to visitors.

The first floor of the Pennovation Center hosted presentations by the UPenn Aviary on the study of bird behavior with computer vision, the Nanorobotics lab on sub-1mm robots, Prof Kostas Daniilidis’ group’s research on reconstructing 3D humans from images and event-based cameras, the Lifelong Machine Learning Research Group’s research on occupancy grid prediction, and ModLab’s Variable Topology Trusses. A notable demo on the first floor was of ModLab’s Quori, a socially interactive robot that allows no-contact human-robot interaction. There were also presentations from our industry colleagues at Treeswift, IQ Motion Control (now Vertiq), Exyn Technologies, Pennovation Works, and LF Intelligence.
Attendees also had the chance to speak with a Faculty member at our “Meet a GRASP Faculty Member” table.


GRASP’s PERCH location on the Pennovation Center’s third floor hosted nine presentation stations including the Kumar Lab’s research on a decentralized multi-agent planning framework with shared semantic representation for multiple robots, the Sung Robotics Lab’s Soft Hybrid Aerial Vehicle, Kod*lab’s legged robots, ModLab’s SMORES-EP, the DAIR Lab’s ContactNets, and Prof. Pratik Chaudhari and PhD student Rahul Ramesh’s Model Zoo.

Building 200 in the Pennovation Center hosted four presentations as well. ModLab demonstrated collective swimming using Modboat robots. ScalAR Lab presented their work on environmental monitoring and adaptive sampling using heterogeneous robot teams. Sung Robotics Lab displayed their origami-inspired swimming robot. ModLab PhD student Devin Carroll also exhibited a robot arm constructed from tree branches to illustrate the ability to design and build robotics with found material.

Although there was no official ICRA tour of the GRASP facilities at Levine, the stairwell of the Pennovation Center was decorated with photos of our main campus lab, additional facilities, and other research projects that our GRASP students and researchers conduct at those locations as well.
GRASP faculty members co-organized three ICRA 2022 full-day workshops on the 23rd as well. The first workshop, Robotics for Climate Change, was co-organized by ScalAR Lab members Tahiya Salam, Prof. M. Ani Hsieh, and Dr. Sandeep Manjanna, among others. This workshop included 7 talks from faculty from institutions such as Rowan University, the National University of Singapore, and McGill University who presented on a variety of projects. There were 15 spotlight talks, including one outlining a publication by GRASP lab members, “Towards Understanding Underwater Weather Events in Rivers Using Autonomous Surface Vehicles”.
Another GRASP-led full-day workshop on the 23rd was the ICRA 2022 Workshop on Collaborative Robots and the Work of the Future, which was co-organized by GRASP faculty member Prof. Nadia Figueroa. There were 7 speakers, followed by a panel discussion with the speakers, spotlights on submitted papers, and breakout sessions. GRASP secondary faculty member Prof. Rahul Mangharam also co-organized the full-day workshop Opportunities and Challenges with Autonomous Racing.
On May 24th, 25th and 26th, the GRASP lab organized an expo booth in ICRA’s Exhibit Hall.
Multiple GRASP research groups presented their work at this booth, including Sung Lab members who demonstrated their Build-A-Bot project and Interactive Robogami; DAIR Lab members who presented their ContactNets model; ModLab members who showcased Quori, SMORES-EP and VTT; Life-Long Machine Learning Group members who presented their occupancy grid prediction research; various KodLab legged demos; MEAM 520 competition demos with the Franca Arms; and Prof. Daniilidis’ event-based cameras. ICRA attendees also had the chance to speak with GRASP faculty members at our “Meet a GRASP Faculty Member” table.


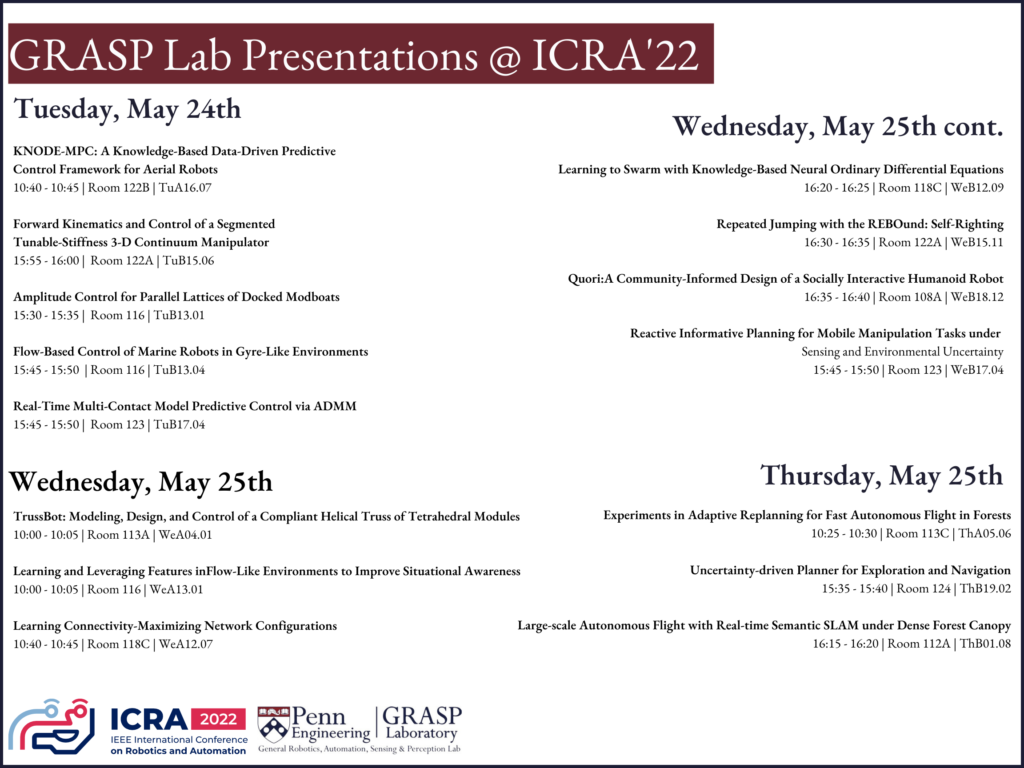
GRASP Lab students and faculty presented a total of 15 posters at ICRA between May 24th and 26th. Here is a full list of these presentations:
One exciting outcome of ICRA 2022 was a GRASP Lab victory at the 10th F1TENTH Autonomous Grand Prix! The University of Pennsylvania was represented by six different teams at the in-person competition in which each team built and raced a 1:10 scaled autonomous race car. The winning team, ScatterBrained, included GRASP students Kedar Prasad Karpe, and Griffon McMahon, along with MEAM MSE Student Jiatong Sun.
GRASP at PERCH hosted a final technical tour on Friday, May 27th from 9:00 AM to 12:00, presenting the same work demonstrated during Monday’s tour to a new set of ICRA attendees. Three GRASP-organized full-day workshops were held on the 27th.
One of the workshops on May 27th was titled Addressing Ethical and Technical Challenges in the Development, Use, and Governance of Lethal Autonomous Weapons Systems and was organized by GRASP faculty member Prof. Dan Koditschek, former GRASP Faculty Affiliate Prof. Lisa Miracchi Titus, and Penn political science professor Prof. Michael Horowitz. The workshop consisted of three sessions with three speakers per session, including talks from Prof. Lisa Miracchi Titus and Prof. Ruzena Bajcsy.
Another workshop titled 2nd Workshop on Bi-Manual Manipulation: Addressing Real-World Challenges was organized by Prof. Nadia Figueroa along with five other national and international robotics faculty and students. This hybrid virtual/in-person workshop included 13 presentations from national and international experts.
GRASP secondary faculty member Prof. James Pikul co-organized a workshop on Energy Storage and Delivery in Robotic Systems. The program included six presentations during an all-virtual early morning session, followed by an onsite late morning session with 4 speakers. The early afternoon session consisted of four presentations, including one by Pikul Research Group’s own postdoctoral associate Muqing Ren. The workshop ended with a late afternoon in-person 10 poster session.
Overall, the GRASP Lab would like to thank all of our students, faculty and staff for their contribution and tremendous effort that led to the amazing impact GRASP was able to make on ICRA 2022!
Photos taken by Justin Nachea
Featured People
GRASP Founder & Faculty Member until '01 - Returned to Penn '21
PhD, MEAM '23, Lecturer at University of Pennsylvania, MEAM
Assistant Professor, ESE
Ruth Yalom Stone Professor, CIS
Research Associate Professor, CIS
Shalini and Rajeev Misra Presidential Assistant Professor, MEAM
Deputy Director, GRASP Lab; Graduate Program Chair, ROBO; Associate Professor, MEAM
Associate Professor of Physical Medicine and Rehabilitation; Secondary Faculty, BE
Alfred Fitler Moore Professor, ESE
Nemirovsky Family Dean, SEAS
Associate Professor, ESE
PostDoc, MEAM '20-'22, Plaksha University
PhD, MEAM - Robotics MSE '22
Associate Professor, Philosophy (2021- 2022)
Assistant Professor, ESE
Assistant Professor, MEAM; GRASP Secondary Faculty Member (2020-2023) - Associate Professor, UW Madison
Assistant Professor, MEAM
Robotics MSE '23
Robotics MSE '24; PhD, CIS '25 - Software Engineer, Waymo
PhD, ESE '22 - VIAM
Associate Professor, MEAM; Secondary faculty, CIS & ESE
Robotics Master's '24; PhD, MEAM '24 - Applied Scientist at Amazon Robotics
Director, GRASP Lab; Faculty Director, Design Studio (Venture Labs); Asa Whitney Professor, MEAM